Object Detection
3714 papers with code • 91 benchmarks • 262 datasets
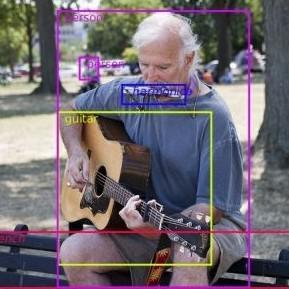
Object Detection is a computer vision task in which the goal is to detect and locate objects of interest in an image or video. The task involves identifying the position and boundaries of objects in an image, and classifying the objects into different categories. It forms a crucial part of vision recognition, alongside image classification and retrieval.
The state-of-the-art methods can be categorized into two main types: one-stage methods and two stage-methods:
-
One-stage methods prioritize inference speed, and example models include YOLO, SSD and RetinaNet.
-
Two-stage methods prioritize detection accuracy, and example models include Faster R-CNN, Mask R-CNN and Cascade R-CNN.
The most popular benchmark is the MSCOCO dataset. Models are typically evaluated according to a Mean Average Precision metric.
( Image credit: Detectron )

Benchmarks
These leaderboards are used to track progress in Object Detection
| Trend | Dataset | Best Model | Paper | Code | Compare |
|---|---|---|---|---|---|

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
Libraries
Use these libraries to find Object Detection models and implementationsDatasets
 MS COCO
MS COCO
 KITTI
KITTI
 nuScenes
nuScenes
 Visual Genome
Visual Genome
 LVIS
LVIS
 SUN RGB-D
SUN RGB-D
 Waymo Open Dataset
Waymo Open Dataset
 BDD100K
BDD100K
 MVTecAD
MVTecAD
 Manga109
Manga109
Subtasks
-
 3D Object Detection
3D Object Detection
-
 Real-Time Object Detection
Real-Time Object Detection
-
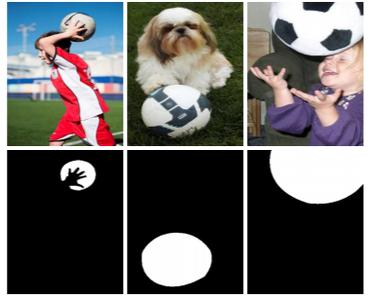
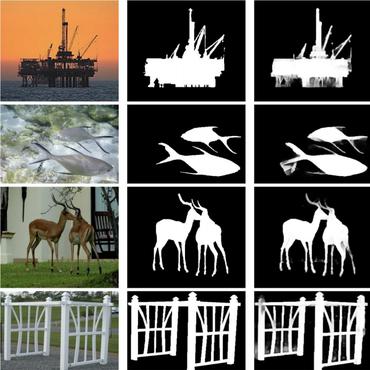 RGB Salient Object Detection
RGB Salient Object Detection
-
 Few-Shot Object Detection
Few-Shot Object Detection
-
Few-Shot Object Detection
-
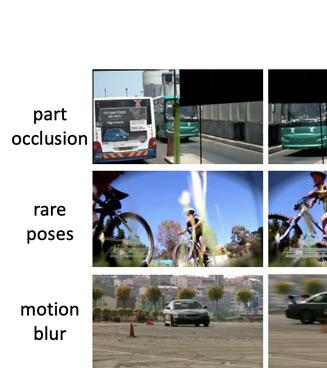
 Video Object Detection
Video Object Detection
-
 RGB-D Salient Object Detection
RGB-D Salient Object Detection
-
 Open Vocabulary Object Detection
Open Vocabulary Object Detection
-
 Object Detection In Aerial Images
Object Detection In Aerial Images
-
 Weakly Supervised Object Detection
Weakly Supervised Object Detection
-
 Robust Object Detection
Robust Object Detection
-
 Small Object Detection
Small Object Detection
-
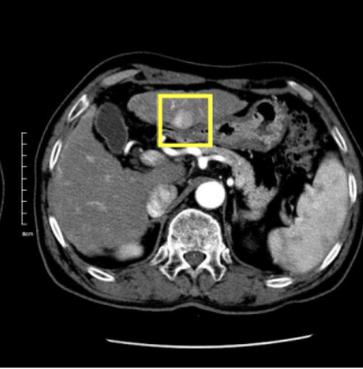 Medical Object Detection
Medical Object Detection
-
 Zero-Shot Object Detection
Zero-Shot Object Detection
-
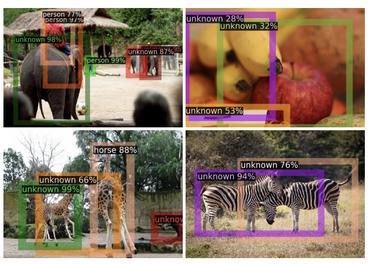 Open World Object Detection
Open World Object Detection
-
 Co-Salient Object Detection
Co-Salient Object Detection
-
 Dense Object Detection
Dense Object Detection
-
 Object Proposal Generation
Object Proposal Generation
-
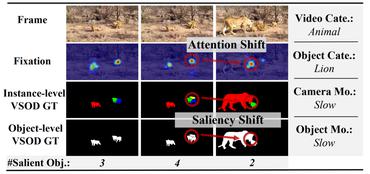 Video Salient Object Detection
Video Salient Object Detection
-
 Camouflaged Object Segmentation
Camouflaged Object Segmentation
-
 License Plate Detection
License Plate Detection
-
Head Detection
-
 Multiview Detection
Multiview Detection
-
 3D Object Detection From Monocular Images
3D Object Detection From Monocular Images
-
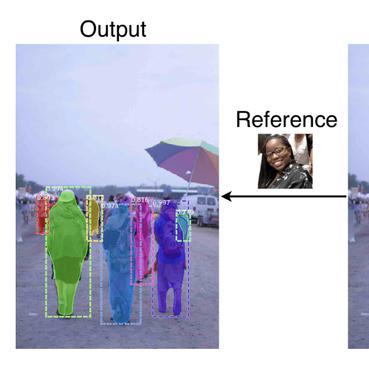 One-Shot Object Detection
One-Shot Object Detection
-
Moving Object Detection
-
Surgical tool detection
-
Described Object Detection
-
Body Detection
-
Pupil Detection
-
 Object Detection In Indoor Scenes
Object Detection In Indoor Scenes
-
 Class-agnostic Object Detection
Class-agnostic Object Detection
-
Semantic Part Detection
-
 Object Skeleton Detection
Object Skeleton Detection
-
Fish Detection
-
 Multiple Affordance Detection
Multiple Affordance Detection
-
Weakly Supervised 3D Detection
Latest papers
Low-Light Image Enhancement Framework for Improved Object Detection in Fisheye Lens Datasets
daitranskku/aic2024-track4-team15
•
 •
•
This study addresses the evolving challenges in urban traffic monitoring detection systems based on fisheye lens cameras by proposing a framework that improves the efficacy and accuracy of these systems.
Training-free Boost for Open-Vocabulary Object Detection with Confidence Aggregation
Specifically, in the region-proposal stage, proposals that contain novel instances showcase lower objectness scores, since they are treated as background proposals during the training phase.
MambaDFuse: A Mamba-based Dual-phase Model for Multi-modality Image Fusion
Multi-modality image fusion (MMIF) aims to integrate complementary information from different modalities into a single fused image to represent the imaging scene and facilitate downstream visual tasks comprehensively.
SFSORT: Scene Features-based Simple Online Real-Time Tracker
This paper introduces SFSORT, the world's fastest multi-object tracking system based on experiments conducted on MOT Challenge datasets.
ConsistencyDet: A Robust Object Detector with a Denoising Paradigm of Consistency Model
In the present study, we introduce a novel framework designed to articulate object detection as a denoising diffusion process, which operates on the perturbed bounding boxes of annotated entities.
Scaling Multi-Camera 3D Object Detection through Weak-to-Strong Eliciting
Finally, for MC3D-Det joint training, the elaborate dataset merge strategy is designed to solve the problem of inconsistent camera numbers and camera parameters.
Retrieval-Augmented Open-Vocabulary Object Detection
Specifically, RALF consists of two modules: Retrieval Augmented Losses (RAL) and Retrieval-Augmented visual Features (RAF).
Detecting Every Object from Events
Object detection is critical in autonomous driving, and it is more practical yet challenging to localize objects of unknown categories: an endeavour known as Class-Agnostic Object Detection (CAOD).
Better Monocular 3D Detectors with LiDAR from the Past
Accurate 3D object detection is crucial to autonomous driving.
AirShot: Efficient Few-Shot Detection for Autonomous Exploration
Few-shot object detection has drawn increasing attention in the field of robotic exploration, where robots are required to find unseen objects with a few online provided examples.
