Object Detection
3706 papers with code • 91 benchmarks • 261 datasets
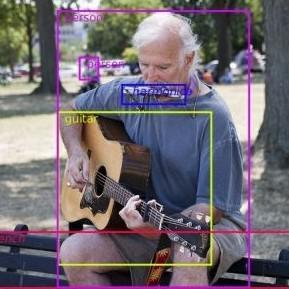
Object Detection is a computer vision task in which the goal is to detect and locate objects of interest in an image or video. The task involves identifying the position and boundaries of objects in an image, and classifying the objects into different categories. It forms a crucial part of vision recognition, alongside image classification and retrieval.
The state-of-the-art methods can be categorized into two main types: one-stage methods and two stage-methods:
-
One-stage methods prioritize inference speed, and example models include YOLO, SSD and RetinaNet.
-
Two-stage methods prioritize detection accuracy, and example models include Faster R-CNN, Mask R-CNN and Cascade R-CNN.
The most popular benchmark is the MSCOCO dataset. Models are typically evaluated according to a Mean Average Precision metric.
( Image credit: Detectron )

Benchmarks
These leaderboards are used to track progress in Object Detection
| Trend | Dataset | Best Model | Paper | Code | Compare |
|---|---|---|---|---|---|

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
Libraries
Use these libraries to find Object Detection models and implementationsDatasets
 MS COCO
MS COCO
 KITTI
KITTI
 nuScenes
nuScenes
 Visual Genome
Visual Genome
 LVIS
LVIS
 SUN RGB-D
SUN RGB-D
 Waymo Open Dataset
Waymo Open Dataset
 BDD100K
BDD100K
 MVTecAD
MVTecAD
 Manga109
Manga109
Subtasks
-
 3D Object Detection
3D Object Detection
-
 Real-Time Object Detection
Real-Time Object Detection
-
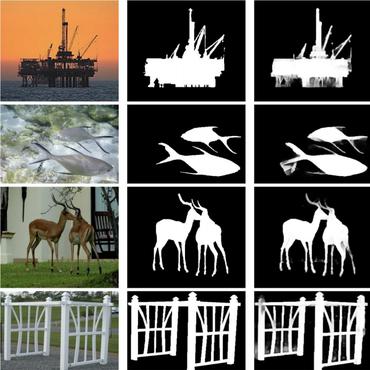 RGB Salient Object Detection
RGB Salient Object Detection
-
 Few-Shot Object Detection
Few-Shot Object Detection
-
Few-Shot Object Detection
-
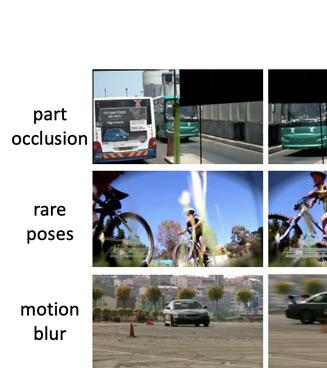
 Video Object Detection
Video Object Detection
-
 RGB-D Salient Object Detection
RGB-D Salient Object Detection
-
 Open Vocabulary Object Detection
Open Vocabulary Object Detection
-
 Object Detection In Aerial Images
Object Detection In Aerial Images
-
 Weakly Supervised Object Detection
Weakly Supervised Object Detection
-
 Small Object Detection
Small Object Detection
-
 Robust Object Detection
Robust Object Detection
-
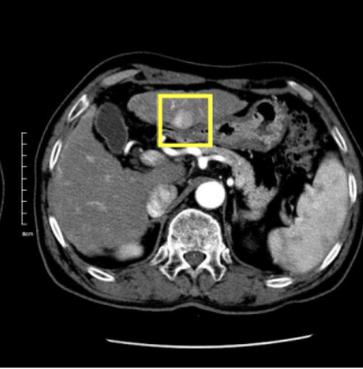 Medical Object Detection
Medical Object Detection
-
 Zero-Shot Object Detection
Zero-Shot Object Detection
-
 Open World Object Detection
Open World Object Detection
-
 Co-Salient Object Detection
Co-Salient Object Detection
-
 Dense Object Detection
Dense Object Detection
-
 Object Proposal Generation
Object Proposal Generation
-
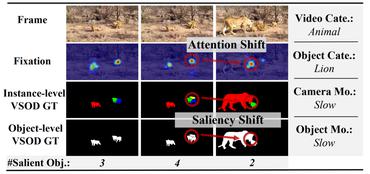 Video Salient Object Detection
Video Salient Object Detection
-
 Camouflaged Object Segmentation
Camouflaged Object Segmentation
-
 License Plate Detection
License Plate Detection
-
Head Detection
-
 Multiview Detection
Multiview Detection
-
 3D Object Detection From Monocular Images
3D Object Detection From Monocular Images
-
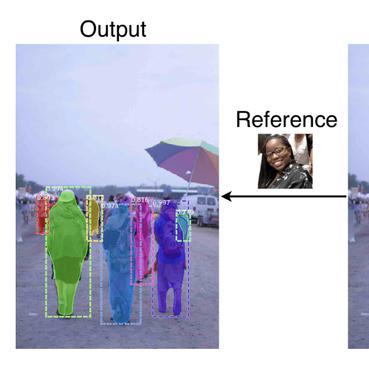 One-Shot Object Detection
One-Shot Object Detection
-
Moving Object Detection
-
Surgical tool detection
-
Described Object Detection
-
Body Detection
-
Pupil Detection
-
 Object Detection In Indoor Scenes
Object Detection In Indoor Scenes
-
 Class-agnostic Object Detection
Class-agnostic Object Detection
-
Semantic Part Detection
-
 Object Skeleton Detection
Object Skeleton Detection
-
Fish Detection
-
 Multiple Affordance Detection
Multiple Affordance Detection
-
Weakly Supervised 3D Detection
Latest papers with no code
A Survey on Visual Mamba
This encompasses general visual tasks, Medical visual tasks (e. g., 2D / 3D segmentation, classification, and image registration, etc.
Efficient Transformer Encoders for Mask2Former-style models
The third step is to use the aforementioned derived dataset to train a gating network that predicts the number of encoder layers to be used, conditioned on the input image.
Source-free Domain Adaptation for Video Object Detection Under Adverse Image Conditions
When deploying pre-trained video object detectors in real-world scenarios, the domain gap between training and testing data caused by adverse image conditions often leads to performance degradation.
Gallbladder Cancer Detection in Ultrasound Images based on YOLO and Faster R-CNN
A fusion method that leverages the benefits of both techniques is presented in this study.
External Prompt Features Enhanced Parameter-efficient Fine-tuning for Salient Object Detection
To better harness the potential of transformers for SOD, we propose a novel parameter-efficient fine-tuning method aimed at reducing the number of training parameters while enhancing the salient object detection capability.
ContextualFusion: Context-Based Multi-Sensor Fusion for 3D Object Detection in Adverse Operating Conditions
The fusion of multimodal sensor data streams such as camera images and lidar point clouds plays an important role in the operation of autonomous vehicles (AVs).
CFPFormer: Feature-pyramid like Transformer Decoder for Segmentation and Detection
Feature pyramids have been widely adopted in convolutional neural networks (CNNs) and transformers for tasks like medical image segmentation and object detection.
CKD: Contrastive Knowledge Distillation from A Sample-wise Perspective
Note that constraints on intra-sample similarities and inter-sample dissimilarities can be efficiently and effectively reformulated into a contrastive learning framework with newly designed positive and negative pairs.
NeRF-DetS: Enhancing Multi-View 3D Object Detection with Sampling-adaptive Network of Continuous NeRF-based Representation
As a preliminary work, NeRF-Det unifies the tasks of novel view synthesis and 3D perception, demonstrating that perceptual tasks can benefit from novel view synthesis methods like NeRF, significantly improving the performance of indoor multi-view 3D object detection.
TeamTrack: A Dataset for Multi-Sport Multi-Object Tracking in Full-pitch Videos
Multi-object tracking (MOT) is a critical and challenging task in computer vision, particularly in situations involving objects with similar appearances but diverse movements, as seen in team sports.
