Depth Estimation
802 papers with code • 14 benchmarks • 70 datasets
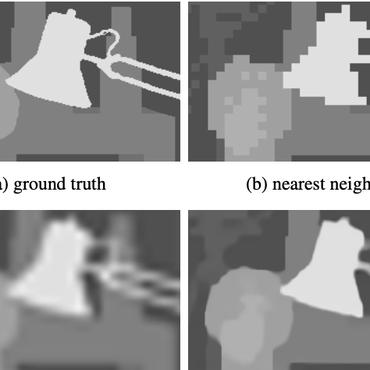
Depth Estimation is the task of measuring the distance of each pixel relative to the camera. Depth is extracted from either monocular (single) or stereo (multiple views of a scene) images. Traditional methods use multi-view geometry to find the relationship between the images. Newer methods can directly estimate depth by minimizing the regression loss, or by learning to generate a novel view from a sequence. The most popular benchmarks are KITTI and NYUv2. Models are typically evaluated according to a RMS metric.

Benchmarks
These leaderboards are used to track progress in Depth Estimation
| Trend | Dataset | Best Model | Paper | Code | Compare |
|---|---|---|---|---|---|

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
Libraries
Use these libraries to find Depth Estimation models and implementations Cityscapes
Cityscapes
 KITTI
KITTI
 ScanNet
ScanNet
 NYUv2
NYUv2
 Matterport3D
Matterport3D
 Middlebury
Middlebury
 TUM RGB-D
TUM RGB-D
 SUNCG
SUNCG
 Taskonomy
Taskonomy
 2D-3D-S
2D-3D-S
Subtasks



Most implemented papers
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture
yhlleo/DeepSegmentor
•
 •
ICCV 2015
•
ICCV 2015
In this paper we address three different computer vision tasks using a single basic architecture: depth prediction, surface normal estimation, and semantic labeling.
Single-Image Depth Perception in the Wild
yifjiang/relative-depth-using-pytorch
•
•
NeurIPS 2016
This paper studies single-image depth perception in the wild, i. e., recovering depth from a single image taken in unconstrained settings.
Deep3D: Fully Automatic 2D-to-3D Video Conversion with Deep Convolutional Neural Networks
piiswrong/deep3d
•
 •
•
As 3D movie viewing becomes mainstream and Virtual Reality (VR) market emerges, the demand for 3D contents is growing rapidly.
Fast Robust Monocular Depth Estimation for Obstacle Detection with Fully Convolutional Networks
fangchangma/sparse-to-dense.pytorch
•
•
We propose a novel appearance-based Object Detection system that is able to detect obstacles at very long range and at a very high speed (~300Hz), without making assumptions on the type of motion.
Parse Geometry from a Line: Monocular Depth Estimation with Partial Laser Observation
fangchangma/sparse-to-dense.pytorch
•
•
Many standard robotic platforms are equipped with at least a fixed 2D laser range finder and a monocular camera.
Revisiting Single Image Depth Estimation: Toward Higher Resolution Maps with Accurate Object Boundaries
JunjH/Revisiting_Single_Depth_Estimation
•
•
Experimental results show that these two improvements enable to attain higher accuracy than the current state-of-the-arts, which is given by finer resolution reconstruction, for example, with small objects and object boundaries.
On the Importance of Stereo for Accurate Depth Estimation: An Efficient Semi-Supervised Deep Neural Network Approach
Despite the progress on monocular depth estimation in recent years, we show that the gap between monocular and stereo depth accuracy remains large$-$a particularly relevant result due to the prevalent reliance upon monocular cameras by vehicles that are expected to be self-driving.
Towards real-time unsupervised monocular depth estimation on CPU
mattpoggi/pydnet
•
 •
•
To tackle this issue, in this paper we propose a novel architecture capable to quickly infer an accurate depth map on a CPU, even of an embedded system, using a pyramid of features extracted from a single input image.
Real-Time Joint Semantic Segmentation and Depth Estimation Using Asymmetric Annotations
DrSleep/multi-task-refinenet
•
•
Deployment of deep learning models in robotics as sensory information extractors can be a daunting task to handle, even using generic GPU cards.
Fast Neural Architecture Search of Compact Semantic Segmentation Models via Auxiliary Cells
drsleep/nas-segm-pytorch
•
•
CVPR 2019
While most results in this domain have been achieved on image classification and language modelling problems, here we concentrate on dense per-pixel tasks, in particular, semantic image segmentation using fully convolutional networks.
