Search Results for author:
Found 11 papers, 6 papers with code
EscherNet: A Generative Model for Scalable View Synthesis
We introduce EscherNet, a multi-view conditioned diffusion model for view synthesis.


vMAP: Vectorised Object Mapping for Neural Field SLAM
We present vMAP, an object-level dense SLAM system using neural field representations.

DA$^2$ Dataset: Toward Dexterity-Aware Dual-Arm Grasping
In this paper, we introduce DA$^2$, the first large-scale dual-arm dexterity-aware dataset for the generation of optimal bimanual grasping pairs for arbitrary large objects.
Semantic Segmentation-assisted Scene Completion for LiDAR Point Clouds
Specifically, the network takes a raw point cloud as input, and merges the features from the segmentation branch into the completion branch hierarchically to provide semantic information.
 Ranked #4 on
3D Semantic Scene Completion
on SemanticKITTI
Ranked #4 on
3D Semantic Scene Completion
on SemanticKITTI


SSC: Semantic Scan Context for Large-Scale Place Recognition
We also present a two-step global semantic ICP to obtain the 3D pose (x, y, yaw) used to align the point cloud to improve matching performance.
 Ranked #1 on
Visual Place Recognition
on KITTI
Ranked #1 on
Visual Place Recognition
on KITTI

SA-LOAM: Semantic-aided LiDAR SLAM with Loop Closure
LiDAR-based SLAM system is admittedly more accurate and stable than others, while its loop closure detection is still an open issue.

HR-Depth: High Resolution Self-Supervised Monocular Depth Estimation
To obtainmore accurate depth estimation in large gradient regions, itis necessary to obtain high-resolution features with spatialand semantic information.
 Ranked #7 on
Unsupervised Monocular Depth Estimation
on KITTI-C
Ranked #7 on
Unsupervised Monocular Depth Estimation
on KITTI-C


FlowMOT: 3D Multi-Object Tracking by Scene Flow Association
Most end-to-end Multi-Object Tracking (MOT) methods face the problems of low accuracy and poor generalization ability.

F-Siamese Tracker: A Frustum-based Double Siamese Network for 3D Single Object Tracking
A main challenge in 3D single object tracking is how to reduce search space for generating appropriate 3D candidates.

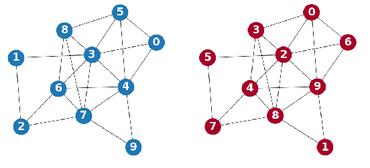
Semantic Graph Based Place Recognition for 3D Point Clouds
First, we propose a novel semantic graph representation for the point cloud scenes by reserving the semantic and topological information of the raw point cloud.
PASS3D: Precise and Accelerated Semantic Segmentation for 3D Point Cloud
In this paper, we propose PASS3D to achieve point-wise semantic segmentation for 3D point cloud.


