STPOTR: Simultaneous Human Trajectory and Pose Prediction Using a Non-Autoregressive Transformer for Robot Following Ahead
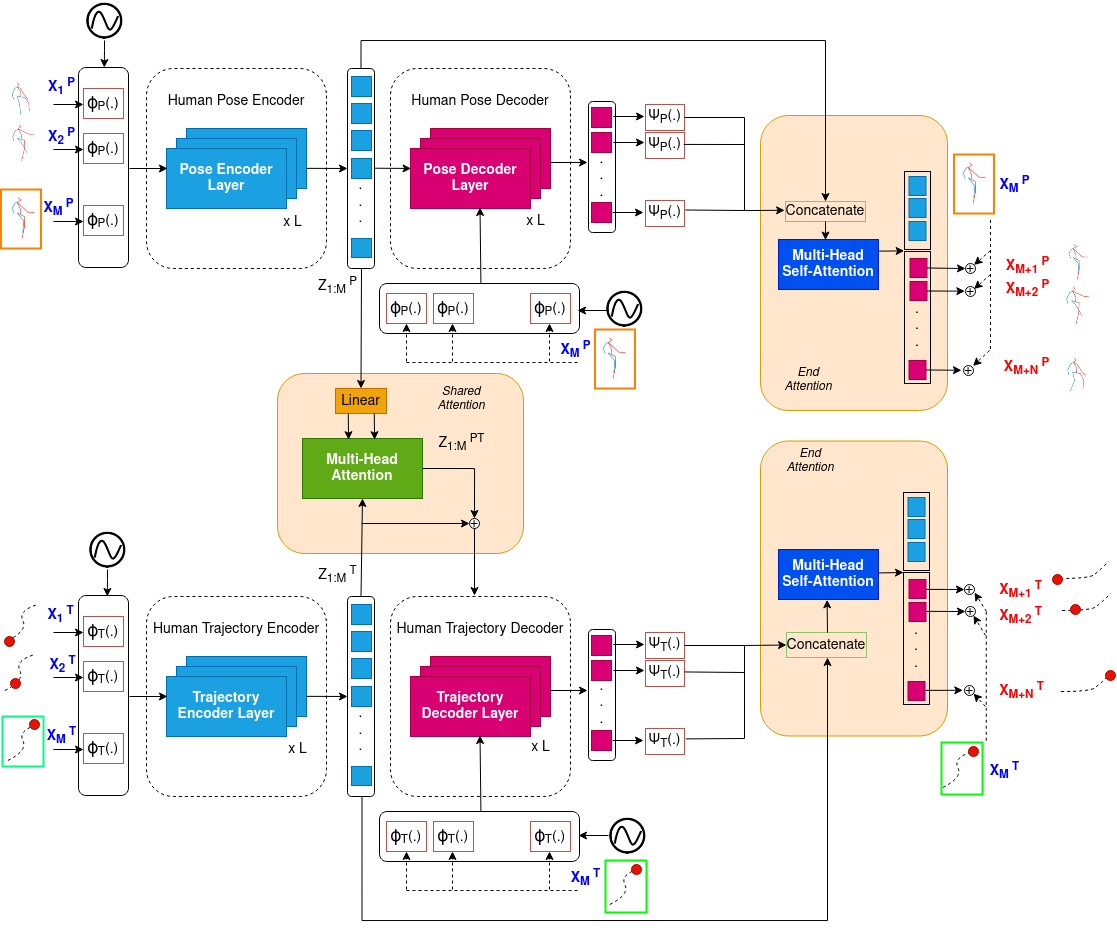
In this paper, we develop a neural network model to predict future human motion from an observed human motion history. We propose a non-autoregressive transformer architecture to leverage its parallel nature for easier training and fast, accurate predictions at test time. The proposed architecture divides human motion prediction into two parts: 1) the human trajectory, which is the hip joint 3D position over time and 2) the human pose which is the all other joints 3D positions over time with respect to a fixed hip joint. We propose to make the two predictions simultaneously, as the shared representation can improve the model performance. Therefore, the model consists of two sets of encoders and decoders. First, a multi-head attention module applied to encoder outputs improves human trajectory. Second, another multi-head self-attention module applied to encoder outputs concatenated with decoder outputs facilitates learning of temporal dependencies. Our model is well-suited for robotic applications in terms of test accuracy and speed, and compares favorably with respect to state-of-the-art methods. We demonstrate the real-world applicability of our work via the Robot Follow-Ahead task, a challenging yet practical case study for our proposed model.
PDF Abstract

