SiCP: Simultaneous Individual and Cooperative Perception for 3D Object Detection in Connected and Automated Vehicles
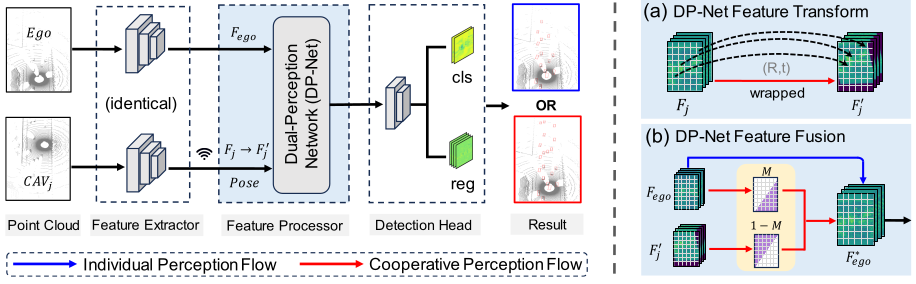
Cooperative perception for connected and automated vehicles is traditionally achieved through the fusion of feature maps from two or more vehicles. However, the absence of feature maps shared from other vehicles can lead to a significant decline in object detection performance for cooperative perception models compared to standalone 3D detection models. This drawback impedes the adoption of cooperative perception as vehicle resources are often insufficient to concurrently employ two perception models. To tackle this issue, we present Simultaneous Individual and Cooperative Perception (SiCP), a generic framework that supports a wide range of the state-of-the-art standalone perception backbones and enhances them with a novel Dual-Perception Network (DP-Net) designed to facilitate both individual and cooperative perception. In addition to its lightweight nature with only 0.13M parameters, DP-Net is robust and retains crucial gradient information during feature map fusion. As demonstrated in a comprehensive evaluation on the OPV2V dataset, thanks to DP-Net, SiCP surpasses state-of-the-art cooperative perception solutions while preserving the performance of standalone perception solutions.
PDF Abstract



 OPV2V
OPV2V
