BADet: Boundary-Aware 3D Object Detection from Point Clouds
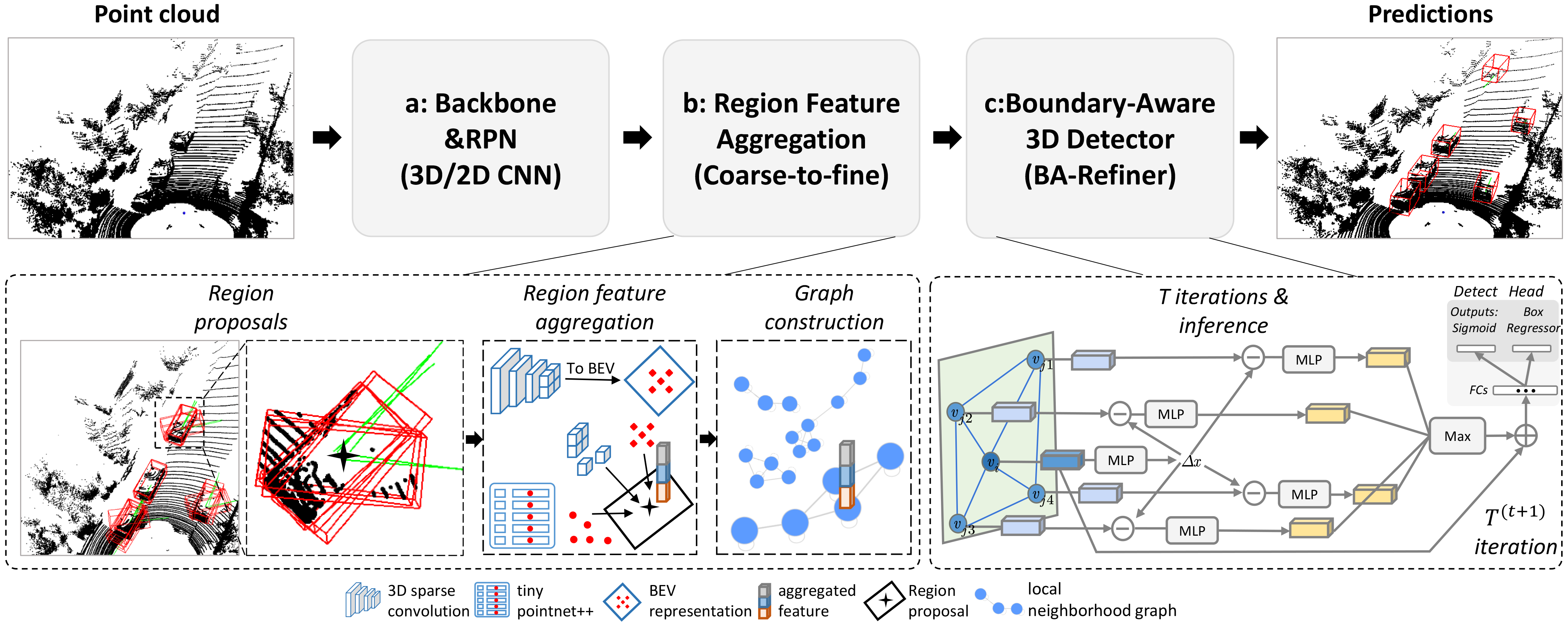
Currently, existing state-of-the-art 3D object detectors are in two-stage paradigm. These methods typically comprise two steps: 1) Utilize a region proposal network to propose a handful of high-quality proposals in a bottom-up fashion. 2) Resize and pool the semantic features from the proposed regions to summarize RoI-wise representations for further refinement. Note that these RoI-wise representations in step 2) are considered individually as uncorrelated entries when fed to following detection headers. Nevertheless, we observe these proposals generated by step 1) offset from ground truth somehow, emerging in local neighborhood densely with an underlying probability. Challenges arise in the case where a proposal largely forsakes its boundary information due to coordinate offset while existing networks lack corresponding information compensation mechanism. In this paper, we propose $BADet$ for 3D object detection from point clouds. Specifically, instead of refining each proposal independently as previous works do, we represent each proposal as a node for graph construction within a given cut-off threshold, associating proposals in the form of local neighborhood graph, with boundary correlations of an object being explicitly exploited. Besides, we devise a lightweight Region Feature Aggregation Module to fully exploit voxel-wise, pixel-wise, and point-wise features with expanding receptive fields for more informative RoI-wise representations. We validate BADet both on widely used KITTI Dataset and highly challenging nuScenes Dataset. As of Apr. 17th, 2021, our BADet achieves on par performance on KITTI 3D detection leaderboard and ranks $1^{st}$ on $Moderate$ difficulty of $Car$ category on KITTI BEV detection leaderboard. The source code is available at https://github.com/rui-qian/BADet.
PDF Abstract



 KITTI
KITTI
 nuScenes
nuScenes
