Search Results for author:
Found 10 papers, 7 papers with code
Learning Pneumatic Non-Prehensile Manipulation with a Mobile Blower
We investigate pneumatic non-prehensile manipulation (i. e., blowing) as a means of efficiently moving scattered objects into a target receptacle.
Amortized Synthesis of Constrained Configurations Using a Differentiable Surrogate
We compare our approach to direct optimization of the design using the learned surrogate, and to supervised learning of the synthesis problem.
Spatial Intention Maps for Multi-Agent Mobile Manipulation
The ability to communicate intention enables decentralized multi-agent robots to collaborate while performing physical tasks.
Task-Agnostic Amortized Inference of Gaussian Process Hyperparameters
One of the appeals of the GP framework is that the marginal likelihood of the kernel hyperparameters is often available in closed form, enabling optimization and sampling procedures to fit these hyperparameters to data.
Spatial Action Maps for Mobile Manipulation
Typical end-to-end formulations for learning robotic navigation involve predicting a small set of steering command actions (e. g., step forward, turn left, turn right, etc.)

A Generalized Algorithm for Multi-Objective Reinforcement Learning and Policy Adaptation
We introduce a new algorithm for multi-objective reinforcement learning (MORL) with linear preferences, with the goal of enabling few-shot adaptation to new tasks.
 Multi-Objective Reinforcement Learning
reinforcement-learning
Multi-Objective Reinforcement Learning
reinforcement-learning
Learning to Infer and Execute 3D Shape Programs
Human perception of 3D shapes goes beyond reconstructing them as a set of points or a composition of geometric primitives: we also effortlessly understand higher-level shape structure such as the repetition and reflective symmetry of object parts.
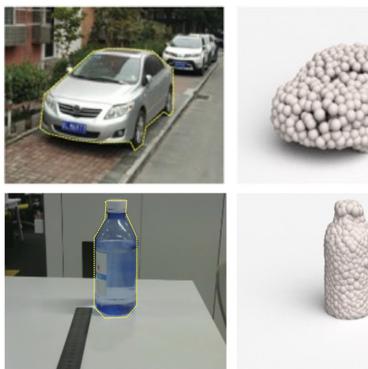
3D Shape Perception from Monocular Vision, Touch, and Shape Priors
Perceiving accurate 3D object shape is important for robots to interact with the physical world.
Pix3D: Dataset and Methods for Single-Image 3D Shape Modeling
We study 3D shape modeling from a single image and make contributions to it in three aspects.
 Ranked #1 on
3D Shape Classification
on Pix3D
Ranked #1 on
3D Shape Classification
on Pix3D

MarrNet: 3D Shape Reconstruction via 2.5D Sketches
First, compared to full 3D shape, 2. 5D sketches are much easier to be recovered from a 2D image; models that recover 2. 5D sketches are also more likely to transfer from synthetic to real data.
Ranked #2 on
3D Shape Classification
on Pix3D
 3D Object Reconstruction From A Single Image
3D Object Reconstruction From A Single Image
 3D Reconstruction
+3
3D Reconstruction
+3
