Search Results for author:
Found 6 papers, 4 papers with code
Imitation Learning: A Survey of Learning Methods, Environments and Metrics
Imitation learning is an approach in which an agent learns how to execute a task by trying to mimic how one or more teachers perform it.

Imitation Learning Datasets: A Toolkit For Creating Datasets, Training Agents and Benchmarking
Imitation learning field requires expert data to train agents in a task.
Self-Supervised Adversarial Imitation Learning
We address this limitation by incorporating a discriminator into the original framework, offering two key advantages and directly solving a learning problem previous work had.
Imitating Unknown Policies via Exploration
Behavioral cloning is an imitation learning technique that teaches an agent how to behave through expert demonstrations.
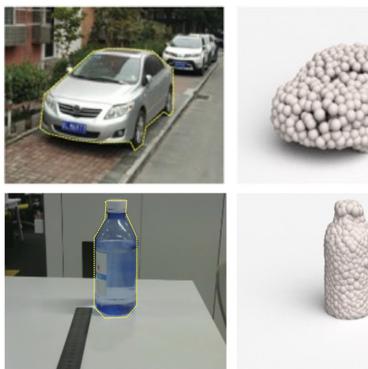
Attention-based 3D Object Reconstruction from a Single Image
Recently, learning-based approaches for 3D reconstruction from 2D images have gained popularity due to its modern applications, e. g., 3D printers, autonomous robots, self-driving cars, virtual reality, and augmented reality.
 3D Object Reconstruction From A Single Image
3D Object Reconstruction From A Single Image
 3D Reconstruction
+2
3D Reconstruction
+2
Augmented Behavioral Cloning from Observation
Imitation from observation is a computational technique that teaches an agent on how to mimic the behavior of an expert by observing only the sequence of states from the expert demonstrations.
