Search Results for author:
Found 2 papers, 0 papers with code
Ravestate: Distributed Composition of a Causal-Specificity-Guided Interaction Policy
In human-robot interaction policy design, a rule-based method is efficient, explainable, expressive and intuitive.

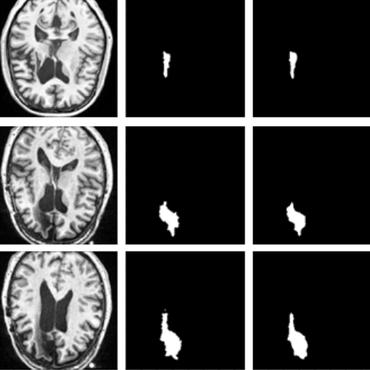
Application of the nnU-Net for automatic segmentation of lung lesion on CT images, and implication on radiomic models
The use of manual vs automatic segmentation in the performance of survival radiomic models was assessed, as well.
Cannot find the paper you are looking for? You can
Submit a new open access paper.
