UniTraj: A Unified Framework for Scalable Vehicle Trajectory Prediction
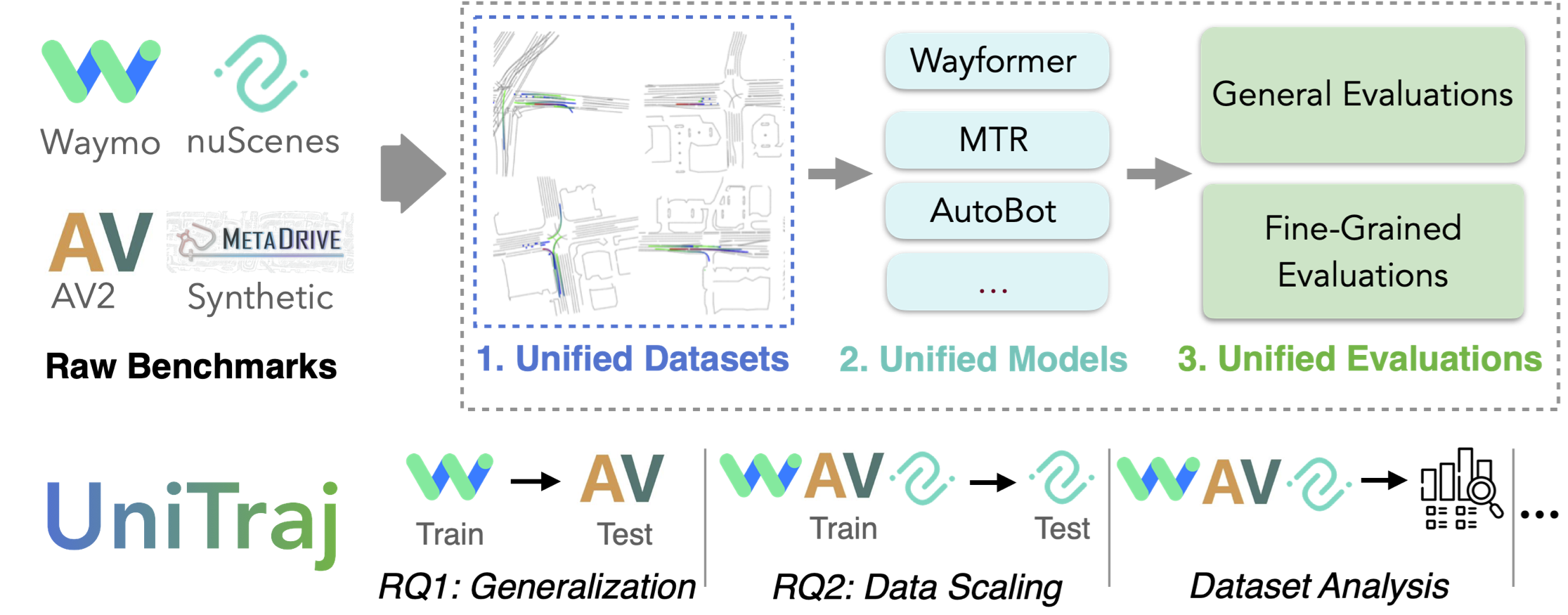
Vehicle trajectory prediction has increasingly relied on data-driven solutions, but their ability to scale to different data domains and the impact of larger dataset sizes on their generalization remain under-explored. While these questions can be studied by employing multiple datasets, it is challenging due to several discrepancies, e.g., in data formats, map resolution, and semantic annotation types. To address these challenges, we introduce UniTraj, a comprehensive framework that unifies various datasets, models, and evaluation criteria, presenting new opportunities for the vehicle trajectory prediction field. In particular, using UniTraj, we conduct extensive experiments and find that model performance significantly drops when transferred to other datasets. However, enlarging data size and diversity can substantially improve performance, leading to a new state-of-the-art result for the nuScenes dataset. We provide insights into dataset characteristics to explain these findings. The code can be found here: https://github.com/vita-epfl/UniTraj
PDF AbstractCode

Tasks

 nuScenes
nuScenes
 Argoverse
Argoverse
 Argoverse 2
Argoverse 2
 Argoverse 2 Motion Forecasting
Argoverse 2 Motion Forecasting
Results from the Paper
 Ranked #1 on
Trajectory Prediction
on nuScenes
(using extra training data)
Ranked #1 on
Trajectory Prediction
on nuScenes
(using extra training data)
| Task | Dataset | Model | Metric Name | Metric Value | Global Rank | Uses Extra Training Data |
Benchmark |
|---|---|---|---|---|---|---|---|
| Trajectory Prediction | nuScenes | UniTraj (MTR) | MinADE_5 | 0.96 | # 1 | ||
| MinADE_10 | 0.84 | # 1 | |||||
| MissRateTopK_2_5 | 0.43 | # 1 | |||||
| MissRateTopK_2_10 | 0.41 | # 6 | |||||
| MinFDE_1 | 5.40 | # 1 | |||||
| OffRoadRate | 0.07 | # 13 |
