Uncertainty-aware Panoptic Segmentation
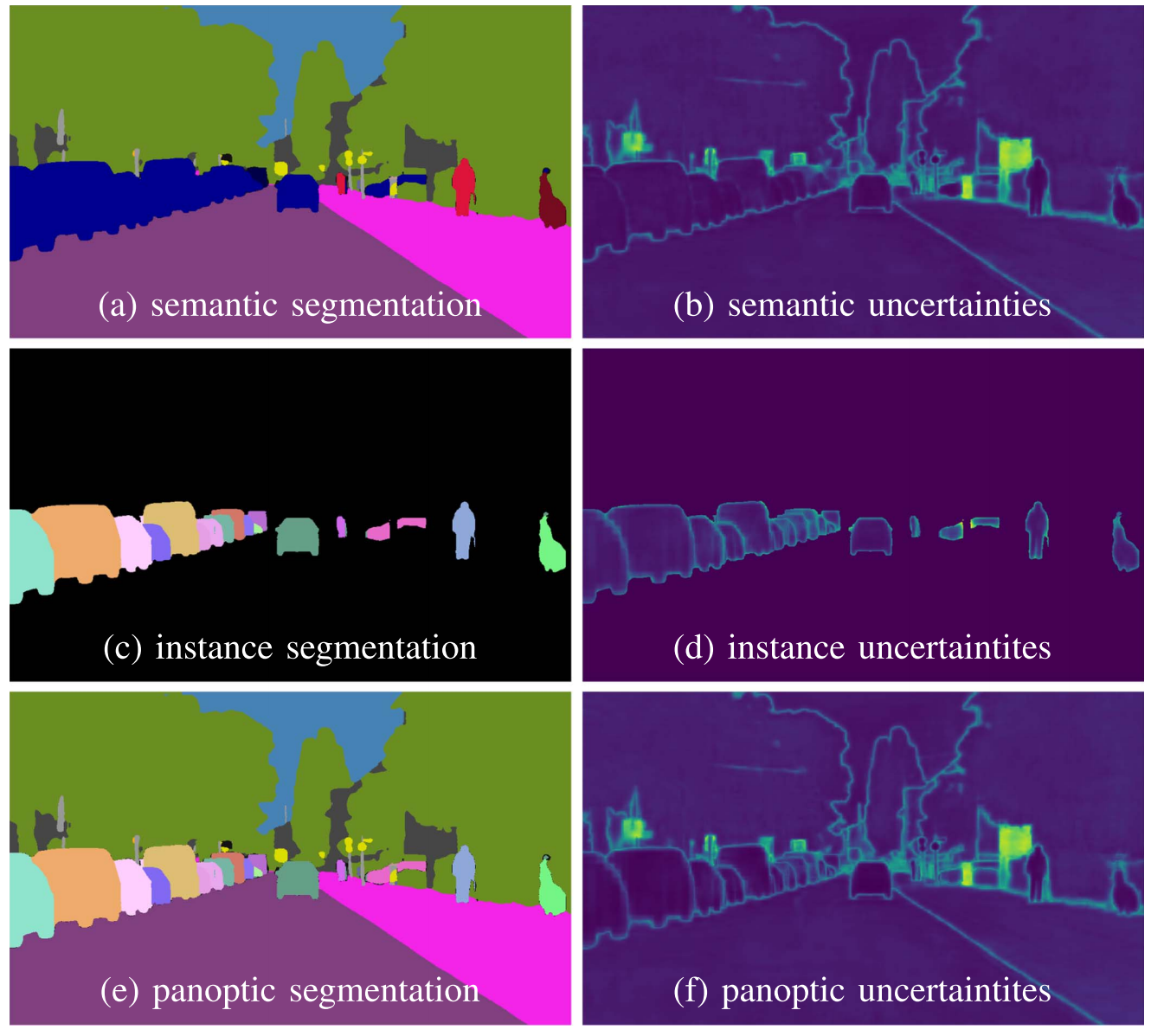
Reliable scene understanding is indispensable for modern autonomous systems. Current learning-based methods typically try to maximize their performance based on segmentation metrics that only consider the quality of the segmentation. However, for the safe operation of a system in the real world it is crucial to consider the uncertainty in the prediction as well. In this work, we introduce the novel task of uncertainty-aware panoptic segmentation, which aims to predict per-pixel semantic and instance segmentations, together with per-pixel uncertainty estimates. We define two novel metrics to facilitate its quantitative analysis, the uncertainty-aware Panoptic Quality (uPQ) and the panoptic Expected Calibration Error (pECE). We further propose the novel top-down Evidential Panoptic Segmentation Network (EvPSNet) to solve this task. Our architecture employs a simple yet effective panoptic fusion module that leverages the predicted uncertainties. Furthermore, we provide several strong baselines combining state-of-the-art panoptic segmentation networks with sampling-free uncertainty estimation techniques. Extensive evaluations show that our EvPSNet achieves the new state-of-the-art for the standard Panoptic Quality (PQ), as well as for our uncertainty-aware panoptic metrics. We make the code available at: \url{https://github.com/kshitij3112/EvPSNet}
PDF Abstract


 Cityscapes
Cityscapes
