Sound Localization from Motion: Jointly Learning Sound Direction and Camera Rotation
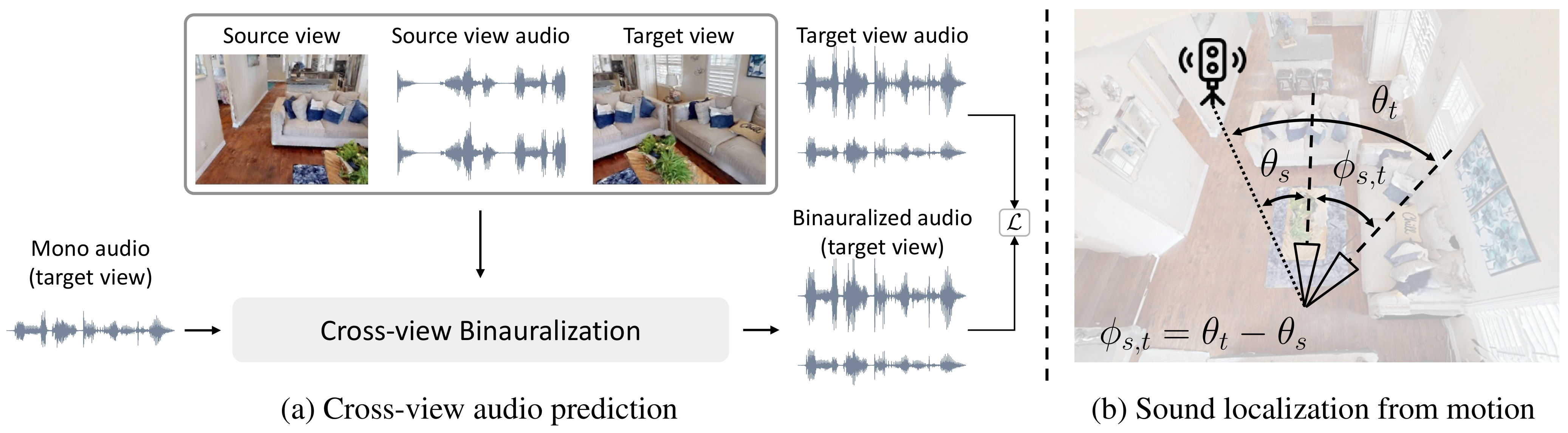
The images and sounds that we perceive undergo subtle but geometrically consistent changes as we rotate our heads. In this paper, we use these cues to solve a problem we call Sound Localization from Motion (SLfM): jointly estimating camera rotation and localizing sound sources. We learn to solve these tasks solely through self-supervision. A visual model predicts camera rotation from a pair of images, while an audio model predicts the direction of sound sources from binaural sounds. We train these models to generate predictions that agree with one another. At test time, the models can be deployed independently. To obtain a feature representation that is well-suited to solving this challenging problem, we also propose a method for learning an audio-visual representation through cross-view binauralization: estimating binaural sound from one view, given images and sound from another. Our model can successfully estimate accurate rotations on both real and synthetic scenes, and localize sound sources with accuracy competitive with state-of-the-art self-supervised approaches. Project site: https://ificl.github.io/SLfM/
PDF Abstract ICCV 2023 PDF ICCV 2023 Abstract
 LibriSpeech
LibriSpeech
 2D-3D-S
2D-3D-S
