SEVD: Synthetic Event-based Vision Dataset for Ego and Fixed Traffic Perception
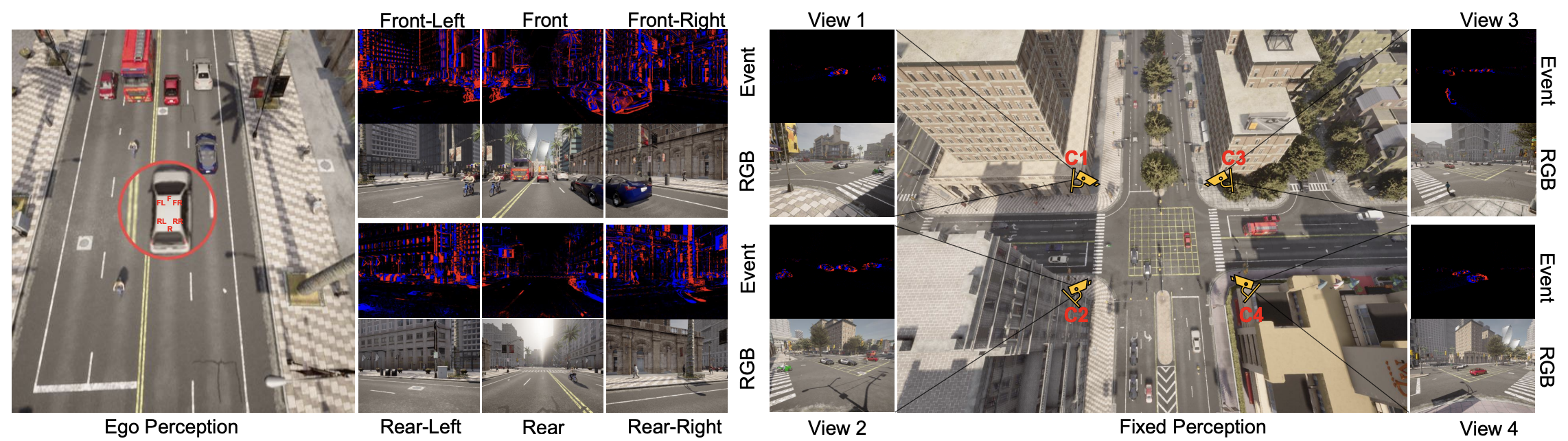
Recently, event-based vision sensors have gained attention for autonomous driving applications, as conventional RGB cameras face limitations in handling challenging dynamic conditions. However, the availability of real-world and synthetic event-based vision datasets remains limited. In response to this gap, we present SEVD, a first-of-its-kind multi-view ego, and fixed perception synthetic event-based dataset using multiple dynamic vision sensors within the CARLA simulator. Data sequences are recorded across diverse lighting (noon, nighttime, twilight) and weather conditions (clear, cloudy, wet, rainy, foggy) with domain shifts (discrete and continuous). SEVD spans urban, suburban, rural, and highway scenes featuring various classes of objects (car, truck, van, bicycle, motorcycle, and pedestrian). Alongside event data, SEVD includes RGB imagery, depth maps, optical flow, semantic, and instance segmentation, facilitating a comprehensive understanding of the scene. Furthermore, we evaluate the dataset using state-of-the-art event-based (RED, RVT) and frame-based (YOLOv8) methods for traffic participant detection tasks and provide baseline benchmarks for assessment. Additionally, we conduct experiments to assess the synthetic event-based dataset's generalization capabilities. The dataset is available at https://eventbasedvision.github.io/SEVD
PDF Abstract





 MS COCO
MS COCO
 CARLA
CARLA
 DDD17
DDD17
