OmniDrones: An Efficient and Flexible Platform for Reinforcement Learning in Drone Control
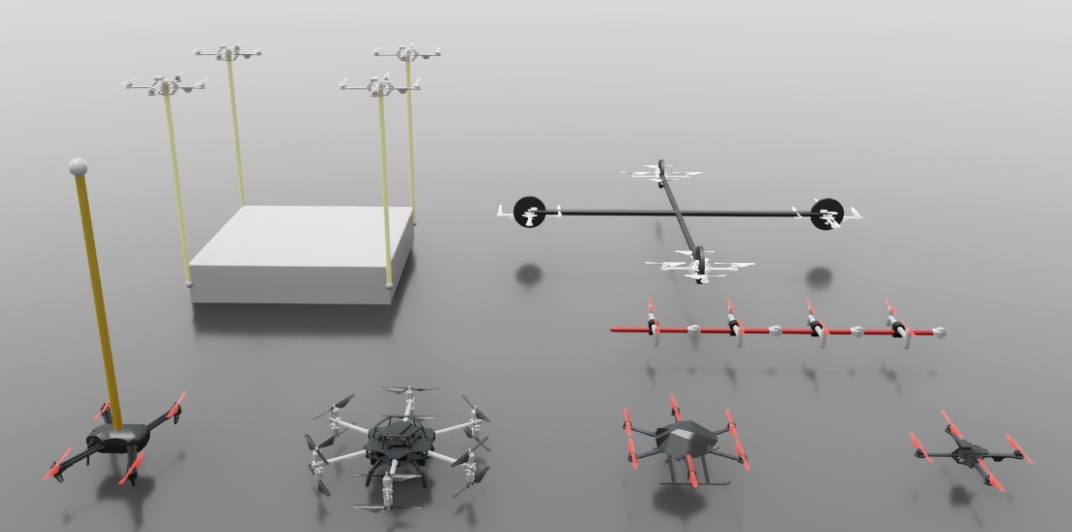
In this work, we introduce OmniDrones, an efficient and flexible platform tailored for reinforcement learning in drone control, built on Nvidia's Omniverse Isaac Sim. It employs a bottom-up design approach that allows users to easily design and experiment with various application scenarios on top of GPU-parallelized simulations. It also offers a range of benchmark tasks, presenting challenges ranging from single-drone hovering to over-actuated system tracking. In summary, we propose an open-sourced drone simulation platform, equipped with an extensive suite of tools for drone learning. It includes 4 drone models, 5 sensor modalities, 4 control modes, over 10 benchmark tasks, and a selection of widely used RL baselines. To showcase the capabilities of OmniDrones and to support future research, we also provide preliminary results on these benchmark tasks. We hope this platform will encourage further studies on applying RL to practical drone systems.
PDF Abstract

