Nav-Q: Quantum Deep Reinforcement Learning for Collision-Free Navigation of Self-Driving Cars
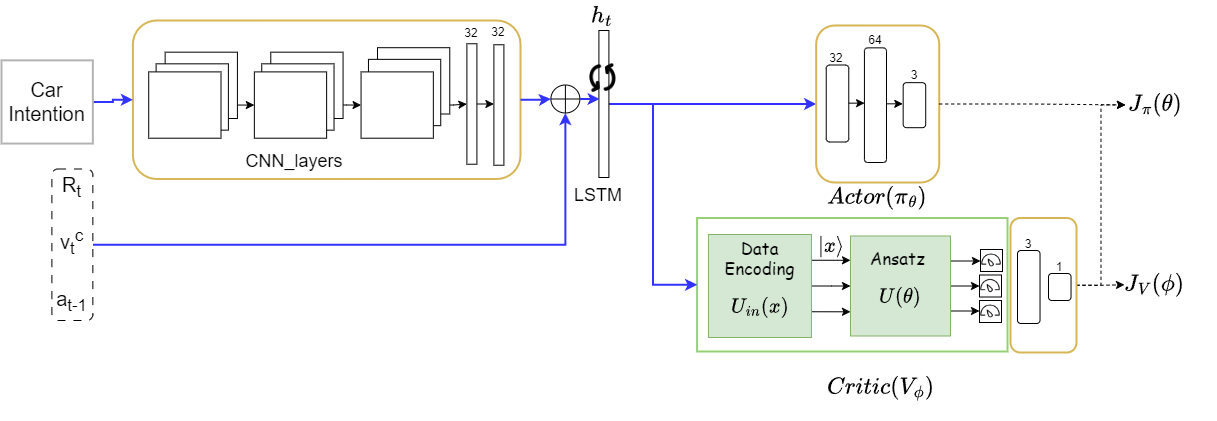
The task of collision-free navigation (CFN) of self-driving cars is an NP-hard problem usually tackled using Deep Reinforcement Learning (DRL). While DRL methods have proven to be effective, their implementation requires substantial computing resources and extended training periods to develop a robust agent. On the other hand, quantum reinforcement learning has recently demonstrated faster convergence and improved stability in simple, non-real-world environments. In this work, we propose Nav-Q, the first quantum-supported DRL algorithm for CFN of self-driving cars, that leverages quantum computation for improving the training performance without the requirement for onboard quantum hardware. Nav-Q is based on the actor-critic approach, where the critic is implemented using a hybrid quantum-classical algorithm suitable for near-term quantum devices. We assess the performance of Nav-Q using the CARLA driving simulator, a de facto standard benchmark for evaluating state-of-the-art DRL methods. Our empirical evaluations showcase that Nav-Q surpasses its classical counterpart in terms of training stability and, in certain instances, with respect to the convergence rate. Furthermore, we assess Nav-Q in relation to effective dimension, unveiling that the incorporation of a quantum component results in a model with greater descriptive power compared to classical baselines. Finally, we evaluate the performance of Nav-Q using noisy quantum simulation, observing that the quantum noise deteriorates the training performances but enhances the exploratory tendencies of the agent during training.
PDF Abstract


 OpenAI Gym
OpenAI Gym
 CARLA
CARLA
