Multimodal Dataset for Localization, Mapping and Crop Monitoring in Citrus Tree Farms
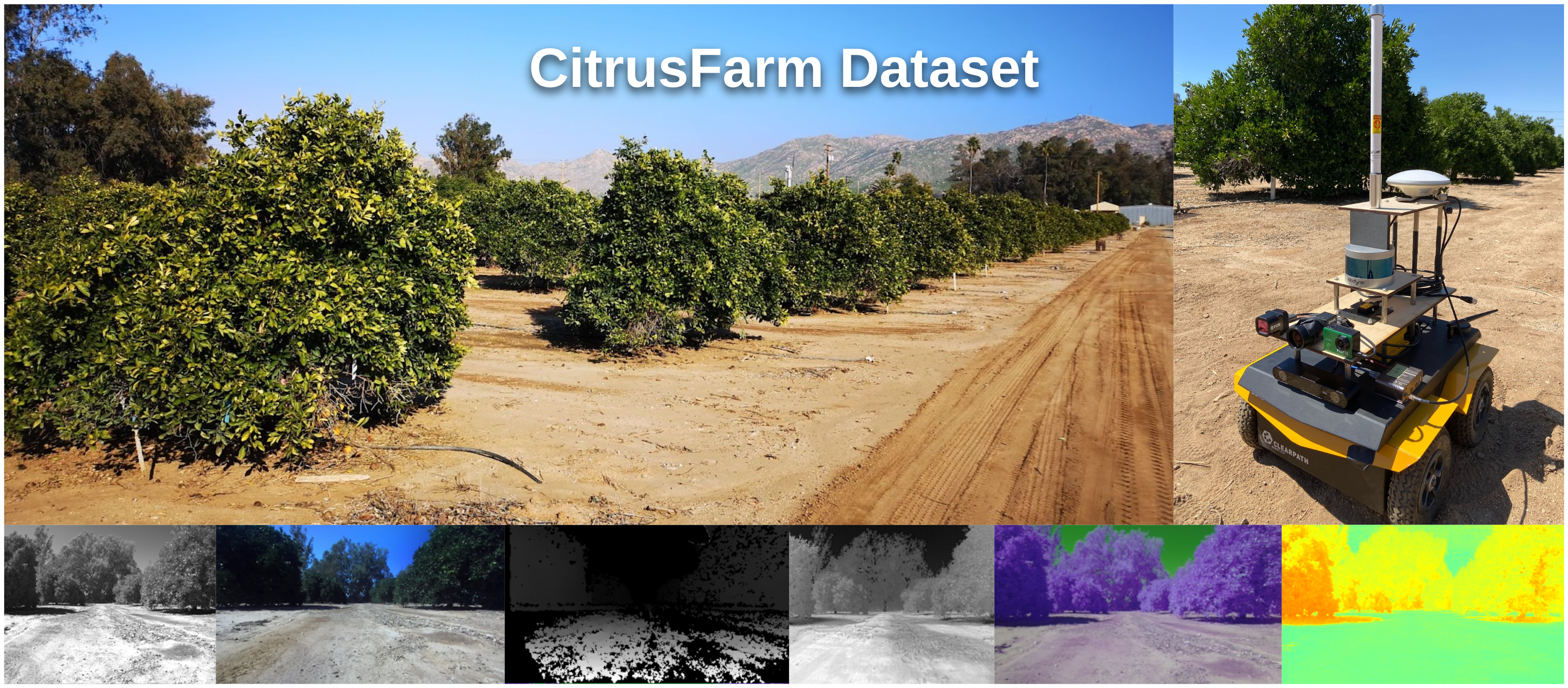
In this work we introduce the CitrusFarm dataset, a comprehensive multimodal sensory dataset collected by a wheeled mobile robot operating in agricultural fields. The dataset offers stereo RGB images with depth information, as well as monochrome, near-infrared and thermal images, presenting diverse spectral responses crucial for agricultural research. Furthermore, it provides a range of navigational sensor data encompassing wheel odometry, LiDAR, inertial measurement unit (IMU), and GNSS with Real-Time Kinematic (RTK) as the centimeter-level positioning ground truth. The dataset comprises seven sequences collected in three fields of citrus trees, featuring various tree species at different growth stages, distinctive planting patterns, as well as varying daylight conditions. It spans a total operation time of 1.7 hours, covers a distance of 7.5 km, and constitutes 1.3 TB of data. We anticipate that this dataset can facilitate the development of autonomous robot systems operating in agricultural tree environments, especially for localization, mapping and crop monitoring tasks. Moreover, the rich sensing modalities offered in this dataset can also support research in a range of robotics and computer vision tasks, such as place recognition, scene understanding, object detection and segmentation, and multimodal learning. The dataset, in conjunction with related tools and resources, is made publicly available at https://github.com/UCR-Robotics/Citrus-Farm-Dataset.
PDF Abstract

