Leveraging Multi-stream Information Fusion for Trajectory Prediction in Low-illumination Scenarios: A Multi-channel Graph Convolutional Approach
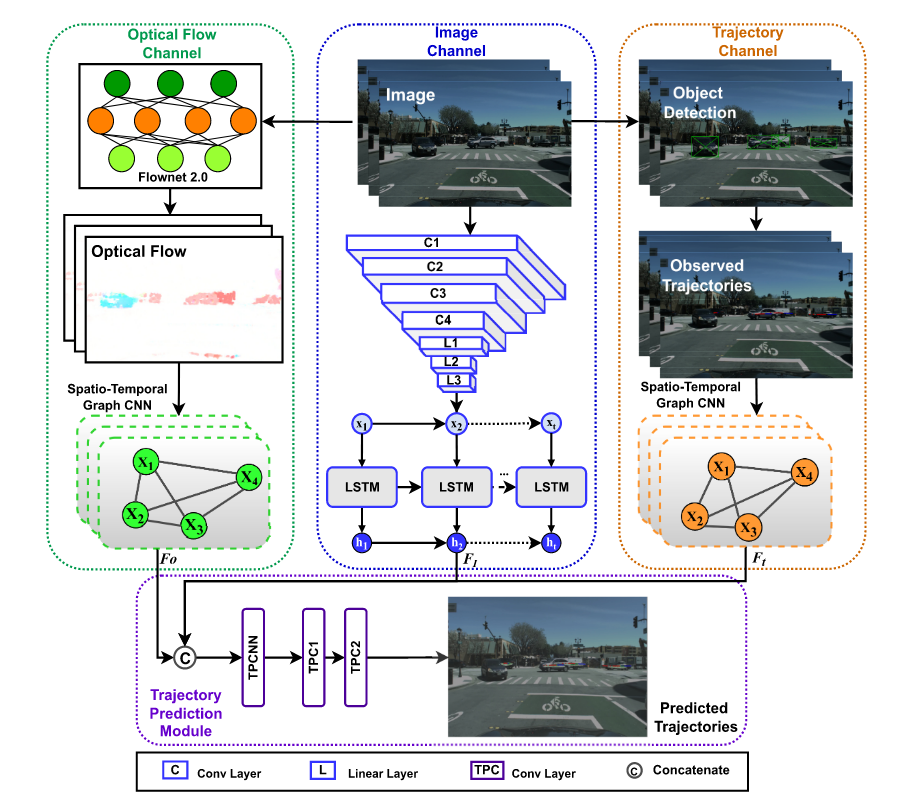
Trajectory prediction is a fundamental problem and challenge for autonomous vehicles. Early works mainly focused on designing complicated architectures for deep-learning-based prediction models in normal-illumination environments, which fail in dealing with low-light conditions. This paper proposes a novel approach for trajectory prediction in low-illumination scenarios by leveraging multi-stream information fusion, which flexibly integrates image, optical flow, and object trajectory information. The image channel employs Convolutional Neural Network (CNN) and Long Short-term Memory (LSTM) networks to extract temporal information from the camera. The optical flow channel is applied to capture the pattern of relative motion between adjacent camera frames and modelled by Spatial-Temporal Graph Convolutional Network (ST-GCN). The trajectory channel is used to recognize high-level interactions between vehicles. Finally, information from all the three channels is effectively fused in the prediction module to generate future trajectories of surrounding vehicles in low-illumination conditions. The proposed multi-channel graph convolutional approach is validated on HEV-I and newly generated Dark-HEV-I, egocentric vision datasets that primarily focus on urban intersection scenarios. The results demonstrate that our method outperforms the baselines, in standard and low-illumination scenarios. Additionally, our approach is generic and applicable to scenarios with different types of perception data. The source code of the proposed approach is available at https://github.com/TommyGong08/MSIF}{https://github.com/TommyGong08/MSIF.
PDF Abstract



