LeTO: Learning Constrained Visuomotor Policy with Differentiable Trajectory Optimization
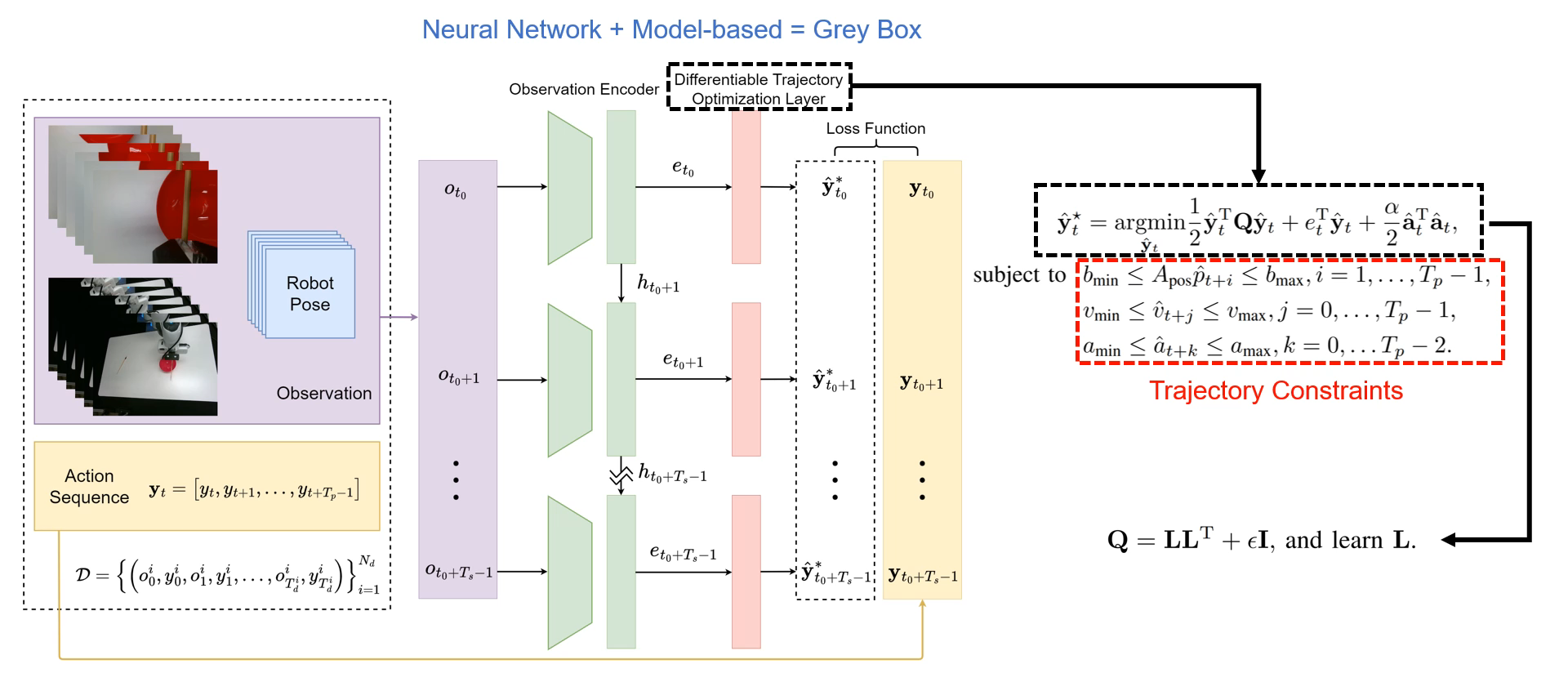
This paper introduces LeTO, a method for learning constrained visuomotor policy via differentiable trajectory optimization. Our approach uniquely integrates a differentiable optimization layer into the neural network. By formulating the optimization layer as a trajectory optimization problem, we enable the model to end-to-end generate actions in a safe and controlled fashion without extra modules. Our method allows for the introduction of constraints information during the training process, thereby balancing the training objectives of satisfying constraints, smoothing the trajectories, and minimizing errors with demonstrations. This "gray box" method marries the optimization-based safety and interpretability with the powerful representational abilities of neural networks. We quantitatively evaluate LeTO in simulation and on the real robot. In simulation, LeTO achieves a success rate comparable to state-of-the-art imitation learning methods, but the generated trajectories are of less uncertainty, higher quality, and smoother. In real-world experiments, we deployed LeTO to handle constraints-critical tasks. The results show the effectiveness of LeTO comparing with state-of-the-art imitation learning approaches. We release our code at https://github.com/ZhengtongXu/LeTO.
PDF Abstract

