GiT: Towards Generalist Vision Transformer through Universal Language Interface
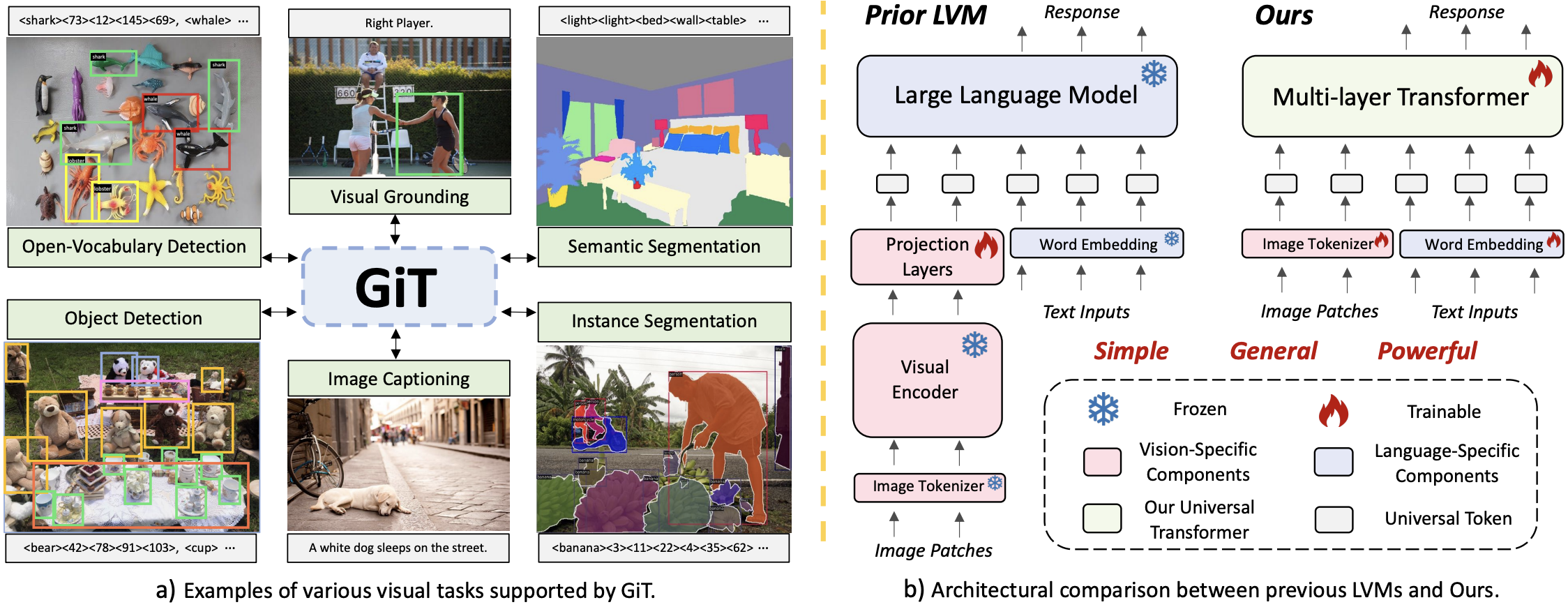
This paper proposes a simple, yet effective framework, called GiT, simultaneously applicable for various vision tasks only with a vanilla ViT. Motivated by the universality of the Multi-layer Transformer architecture (e.g, GPT) widely used in large language models (LLMs), we seek to broaden its scope to serve as a powerful vision foundation model (VFM). However, unlike language modeling, visual tasks typically require specific modules, such as bounding box heads for detection and pixel decoders for segmentation, greatly hindering the application of powerful multi-layer transformers in the vision domain. To solve this, we design a universal language interface that empowers the successful auto-regressive decoding to adeptly unify various visual tasks, from image-level understanding (e.g., captioning), over sparse perception (e.g., detection), to dense prediction (e.g., segmentation). Based on the above designs, the entire model is composed solely of a ViT, without any specific additions, offering a remarkable architectural simplification. GiT is a multi-task visual model, jointly trained across five representative benchmarks without task-specific fine-tuning. Interestingly, our GiT builds a new benchmark in generalist performance, and fosters mutual enhancement across tasks, leading to significant improvements compared to isolated training. This reflects a similar impact observed in LLMs. Further enriching training with 27 datasets, GiT achieves strong zero-shot results over various tasks. Due to its simple design, this paradigm holds promise for narrowing the architectural gap between vision and language. Code and models will be available at \url{https://github.com/Haiyang-W/GiT}.
PDF Abstract
 Spaces
Spaces

 MS COCO
MS COCO
 Cityscapes
Cityscapes
 ADE20K
ADE20K
 SUN RGB-D
SUN RGB-D
 DeepFashion
DeepFashion
 RefCOCO
RefCOCO
 DRIVE
DRIVE
 NoCaps
NoCaps
