Domain Generalization for Vision-based Driving Trajectory Generation
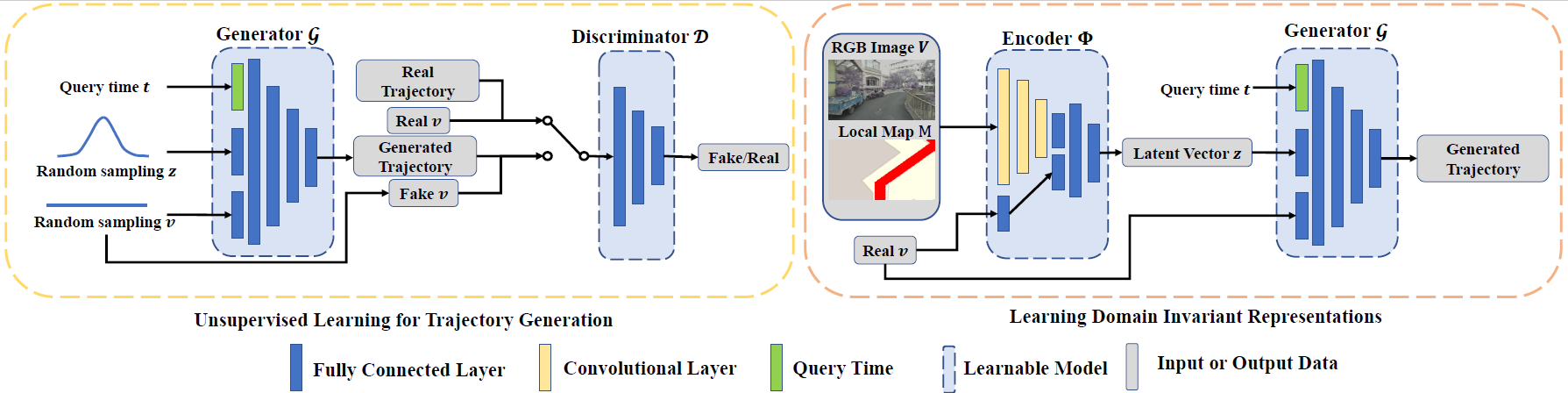
One of the challenges in vision-based driving trajectory generation is dealing with out-of-distribution scenarios. In this paper, we propose a domain generalization method for vision-based driving trajectory generation for autonomous vehicles in urban environments, which can be seen as a solution to extend the Invariant Risk Minimization (IRM) method in complex problems. We leverage an adversarial learning approach to train a trajectory generator as the decoder. Based on the pre-trained decoder, we infer the latent variables corresponding to the trajectories, and pre-train the encoder by regressing the inferred latent variable. Finally, we fix the decoder but fine-tune the encoder with the final trajectory loss. We compare our proposed method with the state-of-the-art trajectory generation method and some recent domain generalization methods on both datasets and simulation, demonstrating that our method has better generalization ability.
PDF Abstract


 CARLA
CARLA
