
Deformable PV-RCNN: Improving 3D Object Detection with Learned Deformations
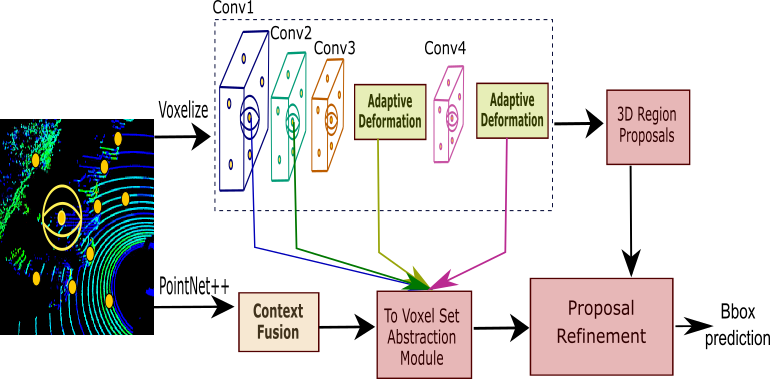
We present Deformable PV-RCNN, a high-performing point-cloud based 3D object detector. Currently, the proposal refinement methods used by the state-of-the-art two-stage detectors cannot adequately accommodate differing object scales, varying point-cloud density, part-deformation and clutter. We present a proposal refinement module inspired by 2D deformable convolution networks that can adaptively gather instance-specific features from locations where informative content exists. We also propose a simple context gating mechanism which allows the keypoints to select relevant context information for the refinement stage. We show state-of-the-art results on the KITTI dataset.
PDF Abstract



 KITTI
KITTI

