CORE: Cooperative Reconstruction for Multi-Agent Perception
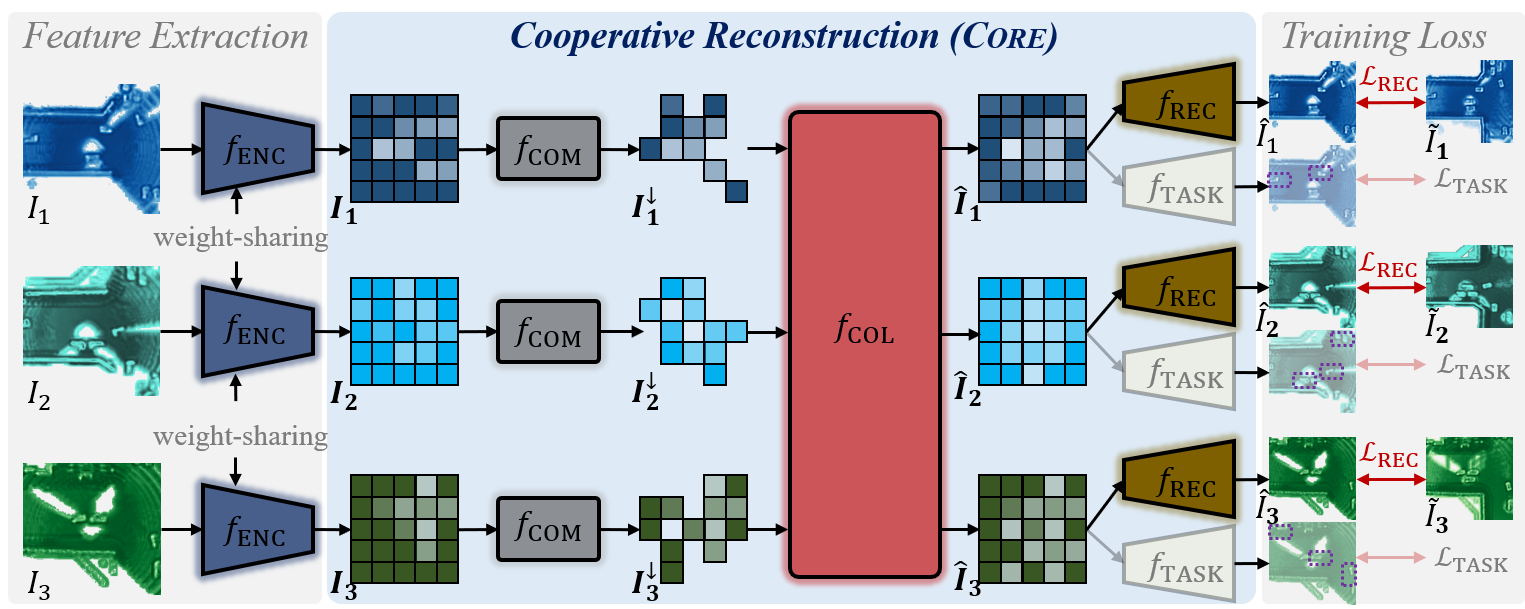
This paper presents CORE, a conceptually simple, effective and communication-efficient model for multi-agent cooperative perception. It addresses the task from a novel perspective of cooperative reconstruction, based on two key insights: 1) cooperating agents together provide a more holistic observation of the environment, and 2) the holistic observation can serve as valuable supervision to explicitly guide the model learning how to reconstruct the ideal observation based on collaboration. CORE instantiates the idea with three major components: a compressor for each agent to create more compact feature representation for efficient broadcasting, a lightweight attentive collaboration component for cross-agent message aggregation, and a reconstruction module to reconstruct the observation based on aggregated feature representations. This learning-to-reconstruct idea is task-agnostic, and offers clear and reasonable supervision to inspire more effective collaboration, eventually promoting perception tasks. We validate CORE on OPV2V, a large-scale multi-agent percetion dataset, in two tasks, i.e., 3D object detection and semantic segmentation. Results demonstrate that the model achieves state-of-the-art performance on both tasks, and is more communication-efficient.
PDF Abstract ICCV 2023 PDF ICCV 2023 Abstract




 CARLA
CARLA
 OPV2V
OPV2V
