MAOMaps
Introduced by Bokovoy et al. in MAOMaps: A Photo-Realistic Benchmark For vSLAM and Map Merging Quality Assessment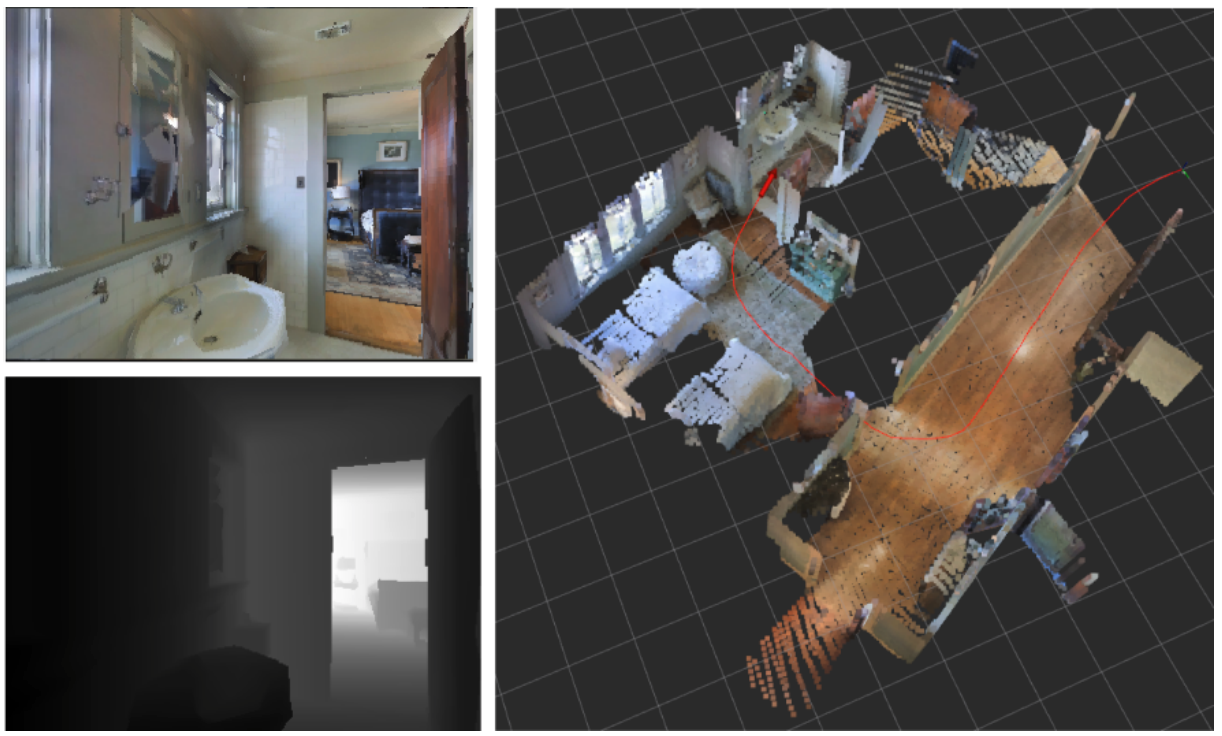
MAOMaps is a dataset for evaluation of Visual SLAM, RGB-D SLAM and Map Merging algorithms. It contains 40 samples with RGB and depth images, and ground truth trajectories and maps. These 40 samples are joined into 20 pairs of overlapping maps for map merging methods evaluation. The samples were collected using Matterport3D dataset and Habitat simulator.
Papers
| Paper | Code | Results | Date | Stars |
|---|
Dataset Loaders
No data loaders found. You can
submit your data loader here.
No data loaders found. You can
submit your data loader here.

