Search Results for author:
Found 3 papers, 2 papers with code
Efficient ConvNet-based Object Detection for Unmanned Aerial Vehicles by Selective Tile Processing
Many applications utilizing Unmanned Aerial Vehicles (UAVs) require the use of computer vision algorithms to analyze the information captured from their on-board camera.


EdgeNet: Balancing Accuracy and Performance for Edge-based Convolutional Neural Network Object Detectors
Moreover, a use-case for pedestrian detection from Unmanned-Areal-Vehicle (UAV) is presented showing the impact that the proposed approach has on sensitivity, average processing time and power consumption when is implemented on different platforms.
DroNet: Efficient convolutional neural network detector for real-time UAV applications
Through the analysis we propose a CNN architecture that is capable of detecting vehicles from aerial UAV images and can operate between 5-18 frames-per-second for a variety of platforms with an overall accuracy of ~95%.
 Object Detection In Aerial Images
Object Detection In Aerial Images
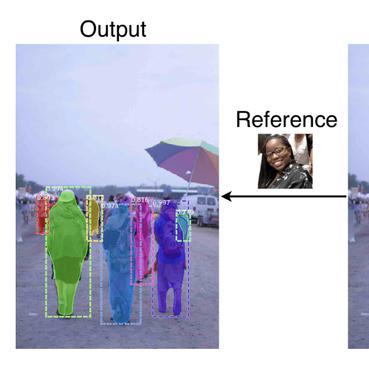 One-Shot Object Detection
+1
One-Shot Object Detection
+1
