Search Results for author:
Found 3 papers, 0 papers with code
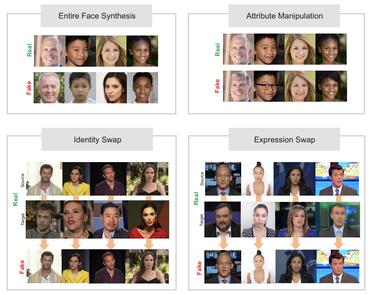
Deepfake detection by exploiting surface anomalies: the SurFake approach
In particular, when an image (video) is captured the overall geometry of the scene (e. g. surfaces) and the acquisition process (e. g. illumination) determine a univocal environment that is directly represented by the image pixel values; all these intrinsic relations are possibly changed by the deepfake generation process.

FLODCAST: Flow and Depth Forecasting via Multimodal Recurrent Architectures
We train the proposed model to also perform predictions for several timesteps in the future.


Forecasting Future Instance Segmentation with Learned Optical Flow and Warping
For an autonomous vehicle it is essential to observe the ongoing dynamics of a scene and consequently predict imminent future scenarios to ensure safety to itself and others.

Cannot find the paper you are looking for? You can
Submit a new open access paper.
