Saliency Detection
130 papers with code • 7 benchmarks • 13 datasets
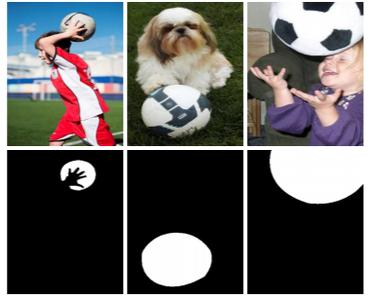
Saliency Detection is a preprocessing step in computer vision which aims at finding salient objects in an image.
Source: An Unsupervised Game-Theoretic Approach to Saliency Detection
Benchmarks
These leaderboards are used to track progress in Saliency Detection
| Trend | Dataset | Best Model | Paper | Code | Compare |
|---|---|---|---|---|---|

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
|||||

|
Libraries
Use these libraries to find Saliency Detection models and implementations PASCAL Context
PASCAL Context
 PASCAL-S
PASCAL-S
 DUTS
DUTS
 HKU-IS
HKU-IS
 DUT-OMRON
DUT-OMRON
 iSUN
iSUN
 CAT2000
CAT2000
 ECSSD
ECSSD
 ReDWeb-S
ReDWeb-S
 Lytro Illum
Lytro Illum
Subtasks


Most implemented papers
PiCANet: Pixel-wise Contextual Attention Learning for Accurate Saliency Detection
We propose three specific formulations of the PiCANet via embedding the pixel-wise contextual attention mechanism into the pooling and convolution operations with attending to global or local contexts.
Light Field Saliency Detection with Deep Convolutional Networks
Light field imaging presents an attractive alternative to RGB imaging because of the recording of the direction of the incoming light.
Motion Guided Attention for Video Salient Object Detection
In this paper, we develop a multi-task motion guided video salient object detection network, which learns to accomplish two sub-tasks using two sub-networks, one sub-network for salient object detection in still images and the other for motion saliency detection in optical flow images.
Unsupervised Discovery of Interpretable Directions in the GAN Latent Space
anvoynov/GANLatentDiscovery
•
 •
ICML 2020
•
ICML 2020
The latent spaces of GAN models often have semantically meaningful directions.
Accurate RGB-D Salient Object Detection via Collaborative Learning
OIPLab-DUT/CoNet
•
•
ECCV 2020
The explicitly extracted edge information goes together with saliency to give more emphasis to the salient regions and object boundaries.
Joint Correcting and Refinement for Balanced Low-Light Image Enhancement
woshiyll/jcrnet
•
 •
•
Specifically, the proposed method, so-called Joint Correcting and Refinement Network (JCRNet), which mainly consists of three stages to balance brightness, color, and illumination of enhancement.
Quantitative Analysis of Automatic Image Cropping Algorithms: A Dataset and Comparative Study
Automatic photo cropping is an important tool for improving visual quality of digital photos without resorting to tedious manual selection.
A Unified RGB-T Saliency Detection Benchmark: Dataset, Baselines, Analysis and A Novel Approach
jxr326/swinmcnet
•
•
In particular, we introduce a weight for each modality to describe the reliability, and integrate them into the graph-based manifold ranking algorithm to achieve adaptive fusion of different source data.
Supervised Saliency Map Driven Segmentation of the Lesions in Dermoscopic Images
In order to detect the lesion in the presence of these problems, we propose a supervised saliency detection method tailored for dermoscopic images based on the discriminative regional feature integration (DRFI).
Saliency Detection by Forward and Backward Cues in Deep-CNNs
As prior knowledge of objects or object features helps us make relations for similar objects on attentional tasks, pre-trained deep convolutional neural networks (CNNs) can be used to detect salient objects on images regardless of the object class is in the network knowledge or not.
