Unified Object Detector for Different Modalities based on Vision Transformers
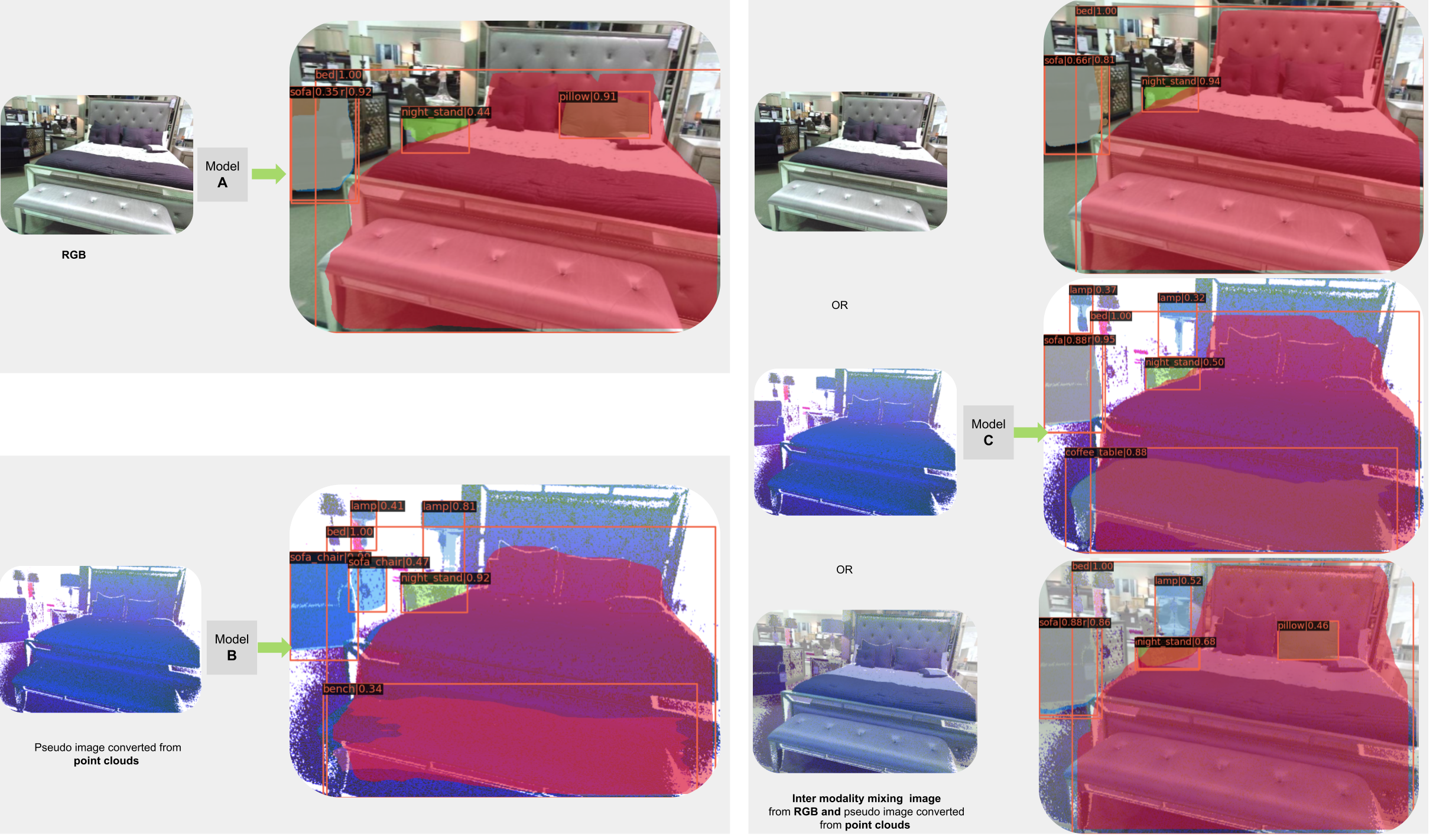
Traditional systems typically require different models for processing different modalities, such as one model for RGB images and another for depth images. Recent research has demonstrated that a single model for one modality can be adapted for another using cross-modality transfer learning. In this paper, we extend this approach by combining cross/inter-modality transfer learning with a vision transformer to develop a unified detector that achieves superior performance across diverse modalities. Our research envisions an application scenario for robotics, where the unified system seamlessly switches between RGB cameras and depth sensors in varying lighting conditions. Importantly, the system requires no model architecture or weight updates to enable this smooth transition. Specifically, the system uses the depth sensor during low-lighting conditions (night time) and both the RGB camera and depth sensor or RGB caemra only in well-lit environments. We evaluate our unified model on the SUN RGB-D dataset, and demonstrate that it achieves similar or better performance in terms of mAP50 compared to state-of-the-art methods in the SUNRGBD16 category, and comparable performance in point cloud only mode. We also introduce a novel inter-modality mixing method that enables our model to achieve significantly better results than previous methods. We provide our code, including training/inference logs and model checkpoints, to facilitate reproducibility and further research. \url{https://github.com/liketheflower/UODDM}
PDF Abstract


 ImageNet
ImageNet
 MS COCO
MS COCO
 SUN RGB-D
SUN RGB-D

