VMNet: Voxel-Mesh Network for Geodesic-Aware 3D Semantic Segmentation
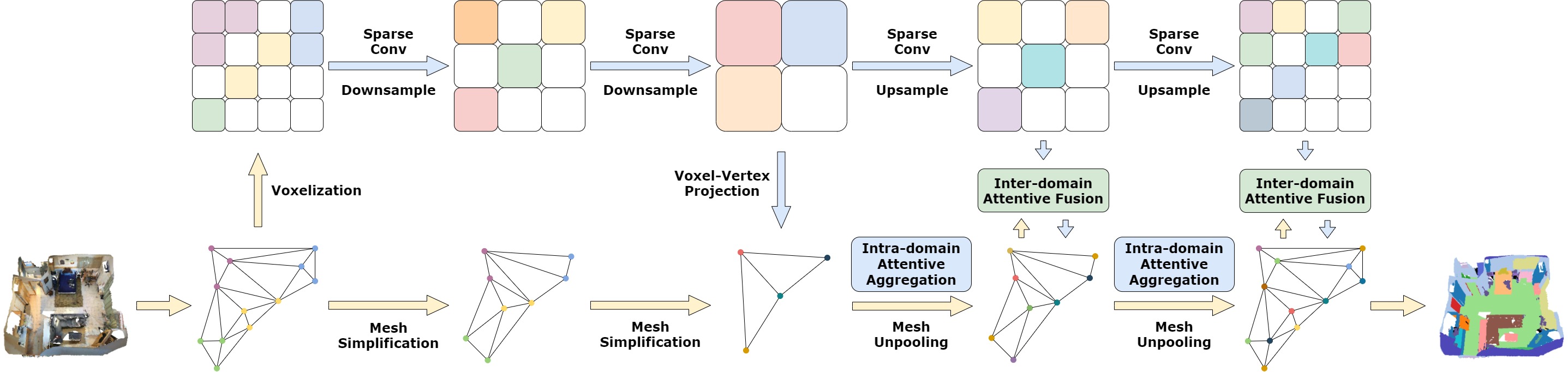
In recent years, sparse voxel-based methods have become the state-of-the-arts for 3D semantic segmentation of indoor scenes, thanks to the powerful 3D CNNs. Nevertheless, being oblivious to the underlying geometry, voxel-based methods suffer from ambiguous features on spatially close objects and struggle with handling complex and irregular geometries due to the lack of geodesic information. In view of this, we present Voxel-Mesh Network (VMNet), a novel 3D deep architecture that operates on the voxel and mesh representations leveraging both the Euclidean and geodesic information. Intuitively, the Euclidean information extracted from voxels can offer contextual cues representing interactions between nearby objects, while the geodesic information extracted from meshes can help separate objects that are spatially close but have disconnected surfaces. To incorporate such information from the two domains, we design an intra-domain attentive module for effective feature aggregation and an inter-domain attentive module for adaptive feature fusion. Experimental results validate the effectiveness of VMNet: specifically, on the challenging ScanNet dataset for large-scale segmentation of indoor scenes, it outperforms the state-of-the-art SparseConvNet and MinkowskiNet (74.6% vs 72.5% and 73.6% in mIoU) with a simpler network structure (17M vs 30M and 38M parameters). Code release: https://github.com/hzykent/VMNet
PDF Abstract ICCV 2021 PDF ICCV 2021 Abstract


 ScanNet
ScanNet
 Matterport3D
Matterport3D
