Compositional Learning-based Planning for Vision POMDPs
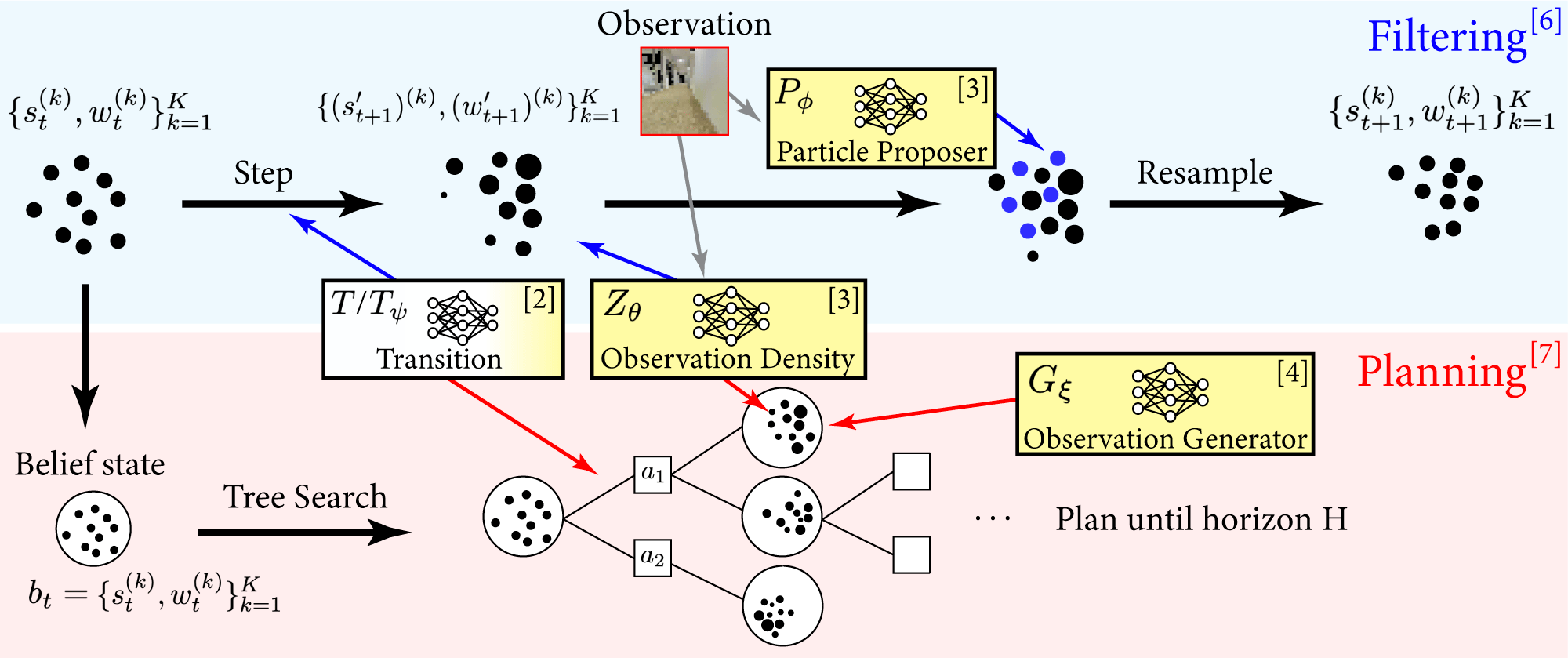
The Partially Observable Markov Decision Process (POMDP) is a powerful framework for capturing decision-making problems that involve state and transition uncertainty. However, most current POMDP planners cannot effectively handle high-dimensional image observations prevalent in real world applications, and often require lengthy online training that requires interaction with the environment. In this work, we propose Visual Tree Search (VTS), a compositional learning and planning procedure that combines generative models learned offline with online model-based POMDP planning. The deep generative observation models evaluate the likelihood of and predict future image observations in a Monte Carlo tree search planner. We show that VTS is robust to different types of image noises that were not present during training and can adapt to different reward structures without the need to re-train. This new approach significantly and stably outperforms several baseline state-of-the-art vision POMDP algorithms while using a fraction of the training time.
PDF Abstract

