Unadversarial Examples: Designing Objects for Robust Vision
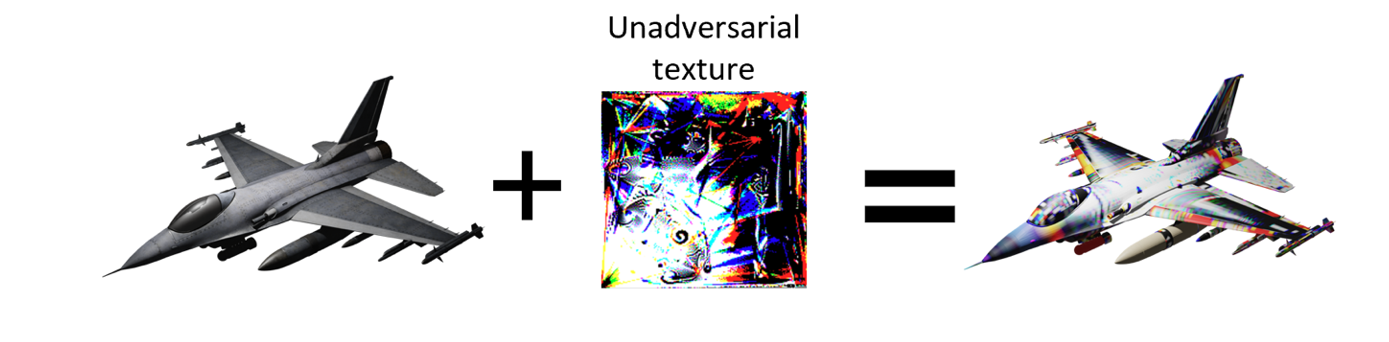
We study a class of realistic computer vision settings wherein one can influence the design of the objects being recognized. We develop a framework that leverages this capability to significantly improve vision models' performance and robustness. This framework exploits the sensitivity of modern machine learning algorithms to input perturbations in order to design "robust objects," i.e., objects that are explicitly optimized to be confidently detected or classified. We demonstrate the efficacy of the framework on a wide variety of vision-based tasks ranging from standard benchmarks, to (in-simulation) robotics, to real-world experiments. Our code can be found at https://git.io/unadversarial .
PDF Abstract NeurIPS 2021 PDF NeurIPS 2021 AbstractCode


Datasets
Add Datasets
introduced or used in this paper
Results from the Paper
Submit
results from this paper
to get state-of-the-art GitHub badges and help the
community compare results to other papers.
Methods
No methods listed for this paper. Add
relevant methods here
