TopoMLP: A Simple yet Strong Pipeline for Driving Topology Reasoning
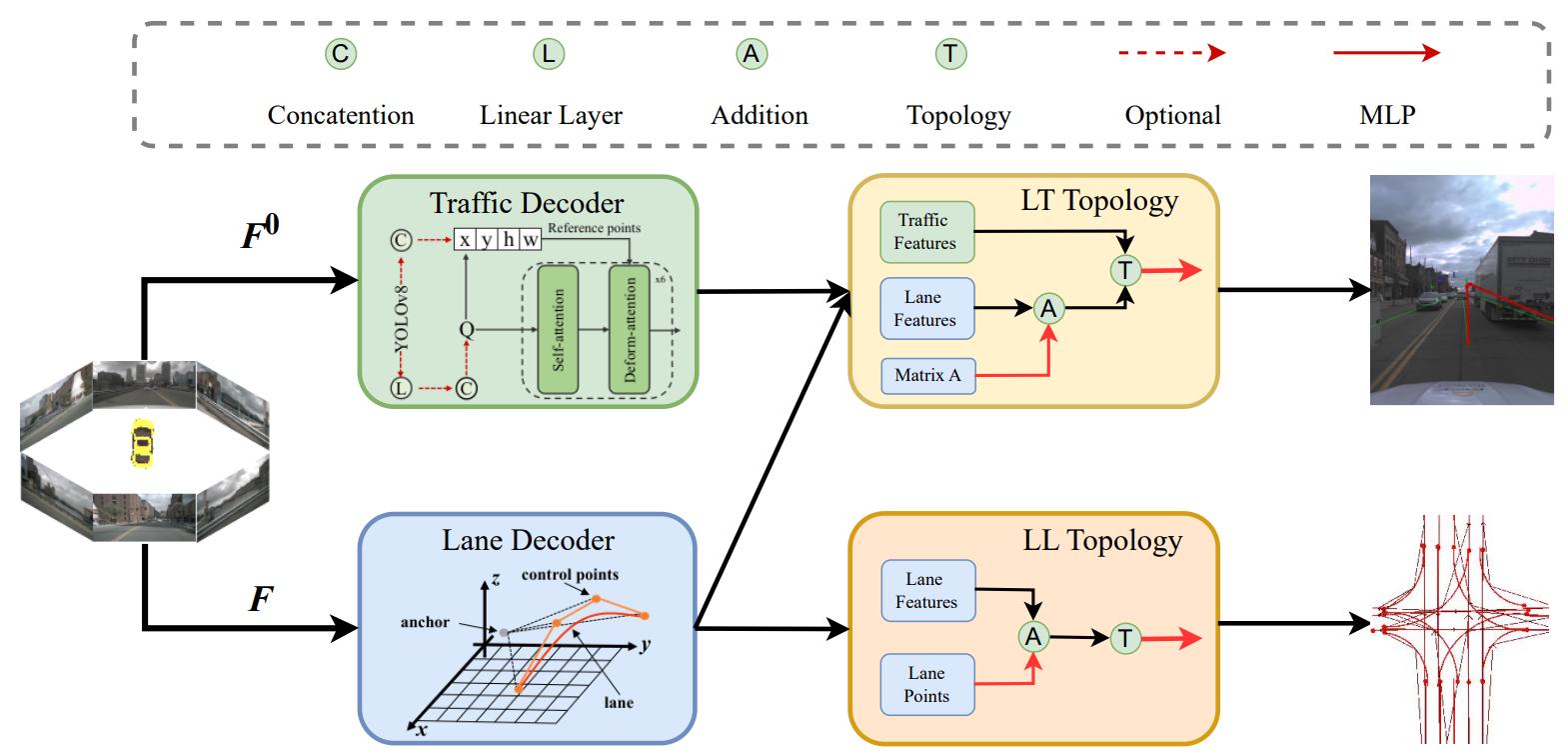
Topology reasoning aims to comprehensively understand road scenes and present drivable routes in autonomous driving. It requires detecting road centerlines (lane) and traffic elements, further reasoning their topology relationship, i.e., lane-lane topology, and lane-traffic topology. In this work, we first present that the topology score relies heavily on detection performance on lane and traffic elements. Therefore, we introduce a powerful 3D lane detector and an improved 2D traffic element detector to extend the upper limit of topology performance. Further, we propose TopoMLP, a simple yet high-performance pipeline for driving topology reasoning. Based on the impressive detection performance, we develop two simple MLP-based heads for topology generation. TopoMLP achieves state-of-the-art performance on OpenLane-V2 benchmark, i.e., 41.2% OLS with ResNet-50 backbone. It is also the 1st solution for 1st OpenLane Topology in Autonomous Driving Challenge. We hope such simple and strong pipeline can provide some new insights to the community. Code is at https://github.com/wudongming97/TopoMLP.
PDF Abstract


 OpenLane-V2 val
OpenLane-V2 val

