Slim-neck by GSConv: A better design paradigm of detector architectures for autonomous vehicles
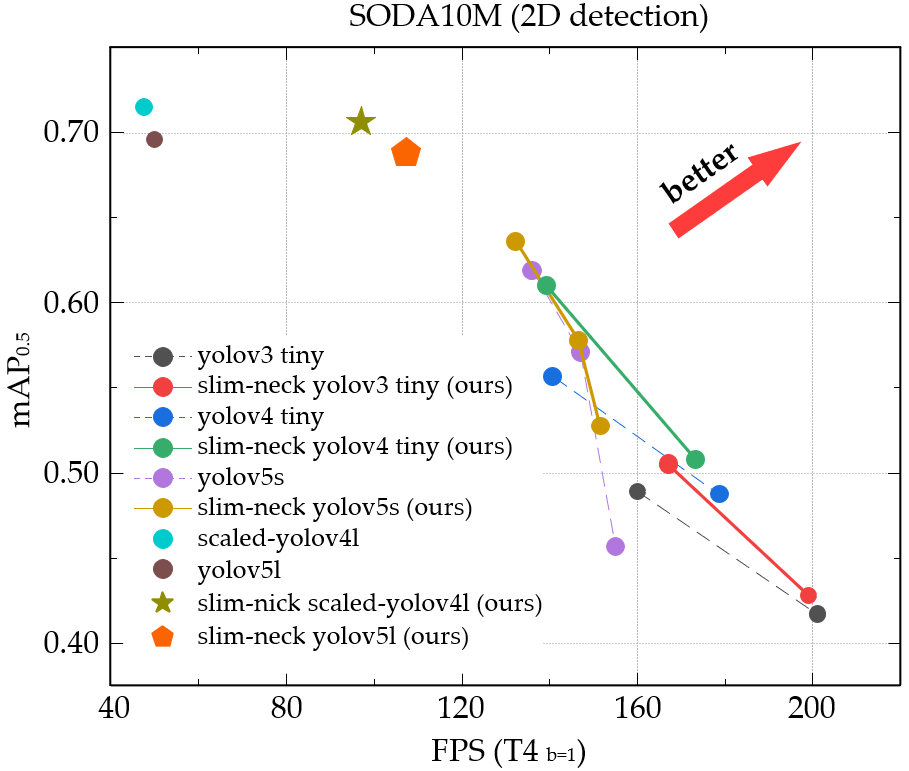
Object detection is a significant downstream task in computer vision. For the on-board edge computing platforms, a giant model is difficult to achieve the real-time detection requirement. And, a lightweight model built from a large number of the depth-wise separable convolution layers cannot achieve the sufficient accuracy. We introduce a new lightweight convolution technique, GSConv, to lighten the model but maintain the accuracy. The GSConv accomplishes an excellent trade-off between the model's accuracy and speed. And, we provide a design paradigm, slim-neck, to achieve a higher computational cost-effectiveness of the detectors. The effectiveness of our approach was robustly demonstrated in over twenty sets comparative experiments. In particular, the detectors of ameliorated by our approach obtains state-of-the-art results (e.g. 70.9% mAP0.5 for the SODA10M at a speed of ~ 100FPS on a Tesla T4 GPU) compared with the originals. Code is available at https://github.com/alanli1997/slim-neck-by-gsconv
PDF Abstract



 DOTA
DOTA
 WiderPerson
WiderPerson
