Real-time Instance Segmentation with Discriminative Orientation Maps
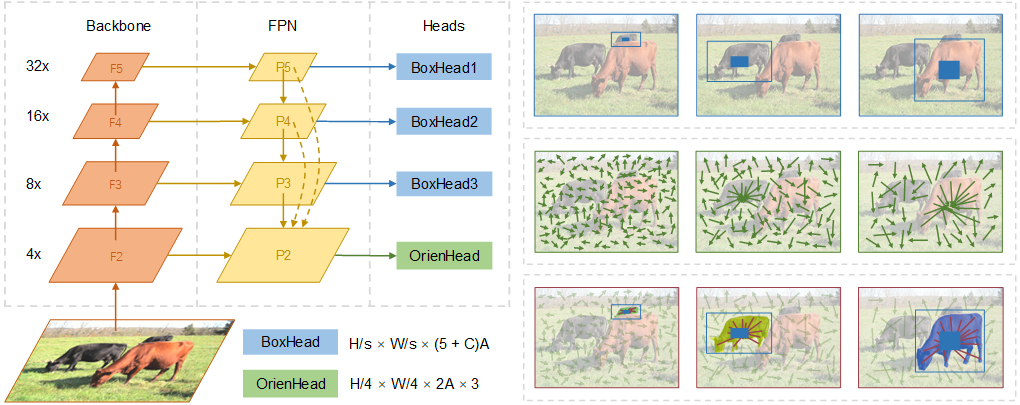
Although instance segmentation has made considerable advancement over recent years, it's still a challenge to design high accuracy algorithms with real-time performance. In this paper, we propose a real-time instance segmentation framework termed OrienMask. Upon the one-stage object detector YOLOv3, a mask head is added to predict some discriminative orientation maps, which are explicitly defined as spatial offset vectors for both foreground and background pixels. Thanks to the discrimination ability of orientation maps, masks can be recovered without the need for extra foreground segmentation. All instances that match with the same anchor size share a common orientation map. This special sharing strategy reduces the amortized memory utilization for mask predictions but without loss of mask granularity. Given the surviving box predictions after NMS, instance masks can be concurrently constructed from the corresponding orientation maps with low complexity. Owing to the concise design for mask representation and its effective integration with the anchor-based object detector, our method is qualified under real-time conditions while maintaining competitive accuracy. Experiments on COCO benchmark show that OrienMask achieves 34.8 mask AP at the speed of 42.7 fps evaluated with a single RTX 2080 Ti. The code is available at https://github.com/duwt/OrienMask.
PDF Abstract ICCV 2021 PDF ICCV 2021 Abstract




 MS COCO
MS COCO
