PreSight: Enhancing Autonomous Vehicle Perception with City-Scale NeRF Priors
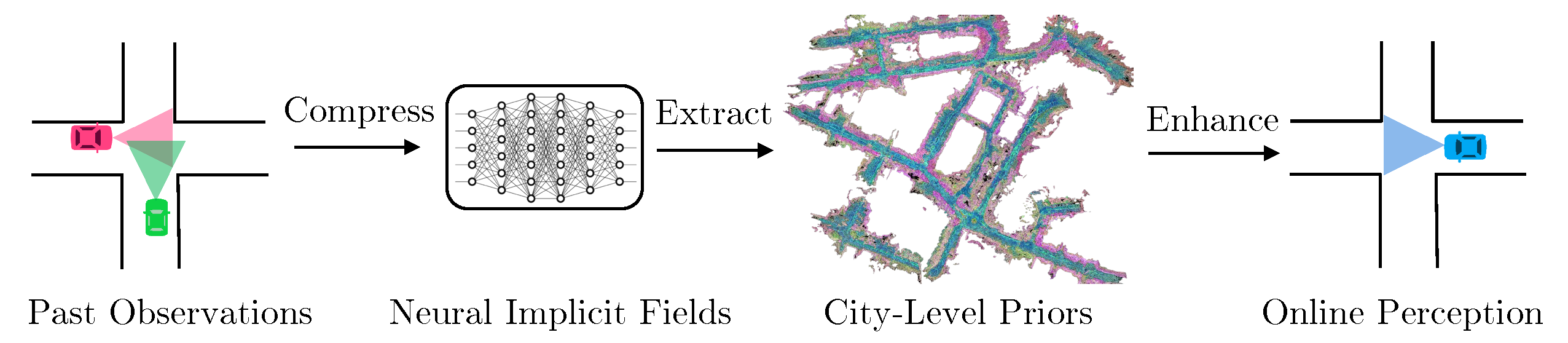
Autonomous vehicles rely extensively on perception systems to navigate and interpret their surroundings. Despite significant advancements in these systems recently, challenges persist under conditions like occlusion, extreme lighting, or in unfamiliar urban areas. Unlike these systems, humans do not solely depend on immediate observations to perceive the environment. In navigating new cities, humans gradually develop a preliminary mental map to supplement real-time perception during subsequent visits. Inspired by this human approach, we introduce a novel framework, Pre-Sight, that leverages past traversals to construct static prior memories, enhancing online perception in later navigations. Our method involves optimizing a city-scale neural radiance field with data from previous journeys to generate neural priors. These priors, rich in semantic and geometric details, are derived without manual annotations and can seamlessly augment various state-of-the-art perception models, improving their efficacy with minimal additional computational cost. Experimental results on the nuScenes dataset demonstrate the framework's high compatibility with diverse online perception models. Specifically, it shows remarkable improvements in HD-map construction and occupancy prediction tasks, highlighting its potential as a new perception framework for autonomous driving systems. Our code will be released at https://github.com/yuantianyuan01/PreSight.
PDF Abstract


 nuScenes
nuScenes
