Performance Characterization of Canonical Mobility Models in Drone Cellular Networks
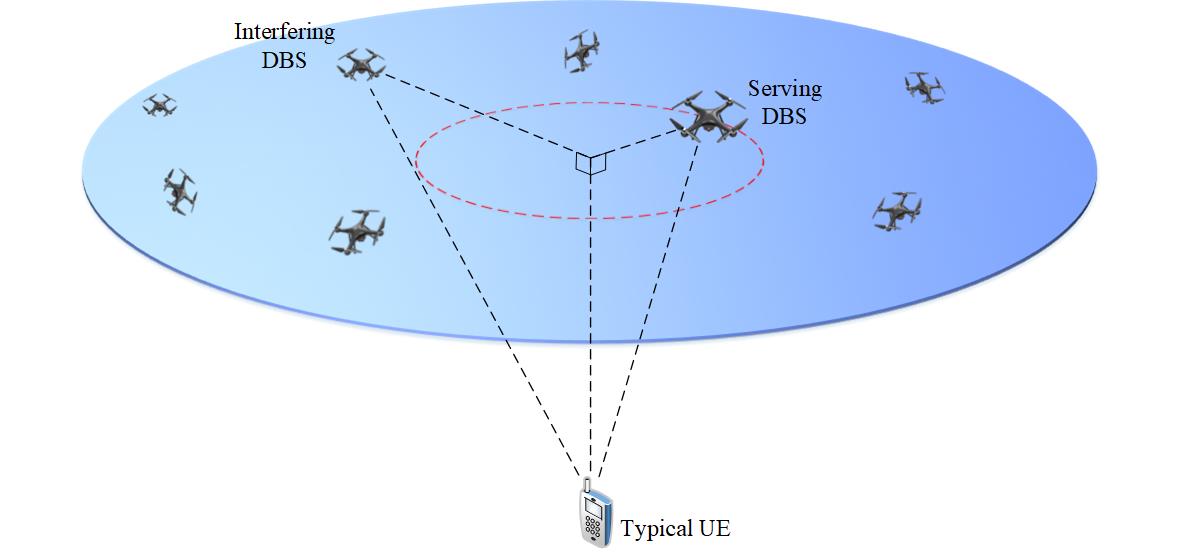
In this paper, we characterize the performance of several canonical mobility models in a drone cellular network in which drone base stations (DBSs) serve user equipments (UEs) on the ground. In particular, we consider the following four mobility models: (i) straight line (SL), (ii) random stop (RS), (iii) random walk (RW), and (iv) random waypoint (RWP), among which the SL mobility model is inspired by the simulation models used by the third generation partnership project (3GPP) for the placement and trajectory of drones, while the other three are well-known canonical models (or their variants) that offer a useful balance between realism and tractability. Assuming the nearest-neighbor association policy, we consider two service models for the UEs: (i) UE independent model (UIM), and (ii) UE dependent model (UDM). While the serving DBS follows the same mobility model as the other DBSs in the UIM, it is assumed to fly towards the UE of interest in the UDM and hover above its location after reaching there. The main contribution of this paper is a unified approach to characterize the point process of DBSs for all the mobility and service models. Using this, we provide exact mathematical expressions for the average received rate and the session rate as seen by the typical UE. Further, using tools from calculus of variations, we concretely demonstrate that the simple SL mobility model provides a lower bound on the performance of other general mobility models (including the ones in which drones follow curved trajectories) as long as the movement of each drone in these models is independent and identically distributed (i.i.d.). To the best of our knowledge, this is the first work that provides a rigorous analysis of key canonical mobility models for an infinite drone cellular network and establishes useful connections between them.
PDF Abstract