Part-Aware Data Augmentation for 3D Object Detection in Point Cloud
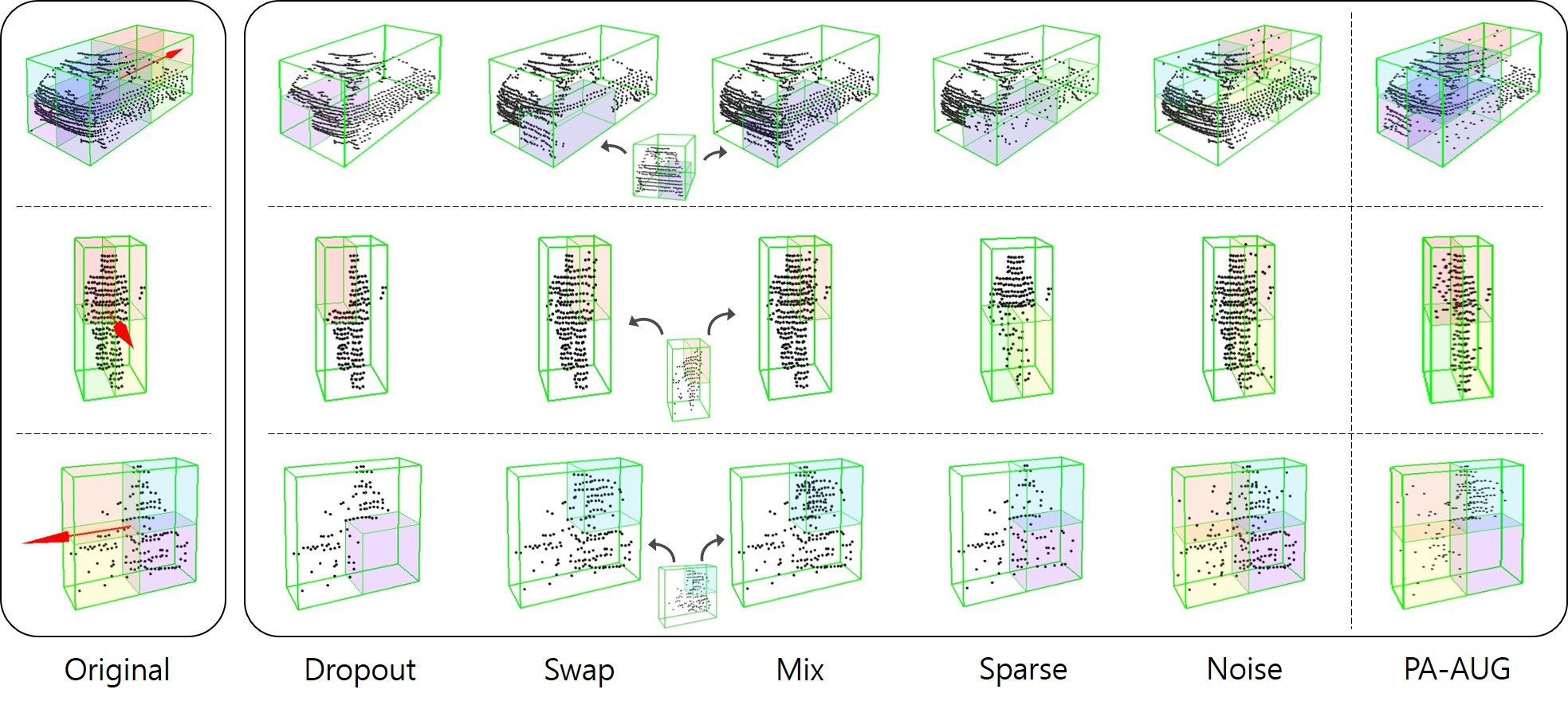
Data augmentation has greatly contributed to improving the performance in image recognition tasks, and a lot of related studies have been conducted. However, data augmentation on 3D point cloud data has not been much explored. 3D label has more sophisticated and rich structural information than the 2D label, so it enables more diverse and effective data augmentation. In this paper, we propose part-aware data augmentation (PA-AUG) that can better utilize rich information of 3D label to enhance the performance of 3D object detectors. PA-AUG divides objects into partitions and stochastically applies five augmentation methods to each local region. It is compatible with existing point cloud data augmentation methods and can be used universally regardless of the detector's architecture. PA-AUG has improved the performance of state-of-the-art 3D object detector for all classes of the KITTI dataset and has the equivalent effect of increasing the train data by about 2.5$\times$. We also show that PA-AUG not only increases performance for a given dataset but also is robust to corrupted data. The code is available at https://github.com/sky77764/pa-aug.pytorch
PDF Abstract




