Neural Point-Based Graphics
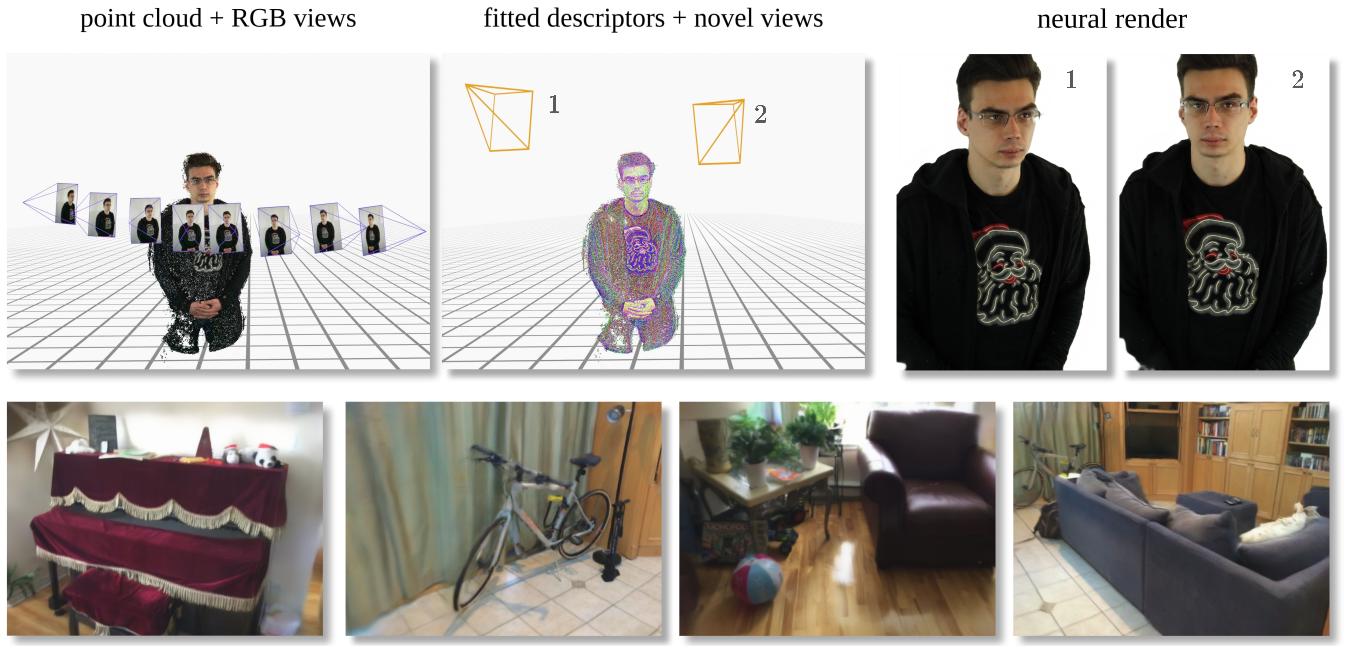
We present a new point-based approach for modeling the appearance of real scenes. The approach uses a raw point cloud as the geometric representation of a scene, and augments each point with a learnable neural descriptor that encodes local geometry and appearance. A deep rendering network is learned in parallel with the descriptors, so that new views of the scene can be obtained by passing the rasterizations of a point cloud from new viewpoints through this network. The input rasterizations use the learned descriptors as point pseudo-colors. We show that the proposed approach can be used for modeling complex scenes and obtaining their photorealistic views, while avoiding explicit surface estimation and meshing. In particular, compelling results are obtained for scene scanned using hand-held commodity RGB-D sensors as well as standard RGB cameras even in the presence of objects that are challenging for standard mesh-based modeling.
PDF Abstract ECCV 2020 PDF ECCV 2020 Abstract

 ScanNet
ScanNet
