Multi-Camera Trajectory Forecasting: Pedestrian Trajectory Prediction in a Network of Cameras
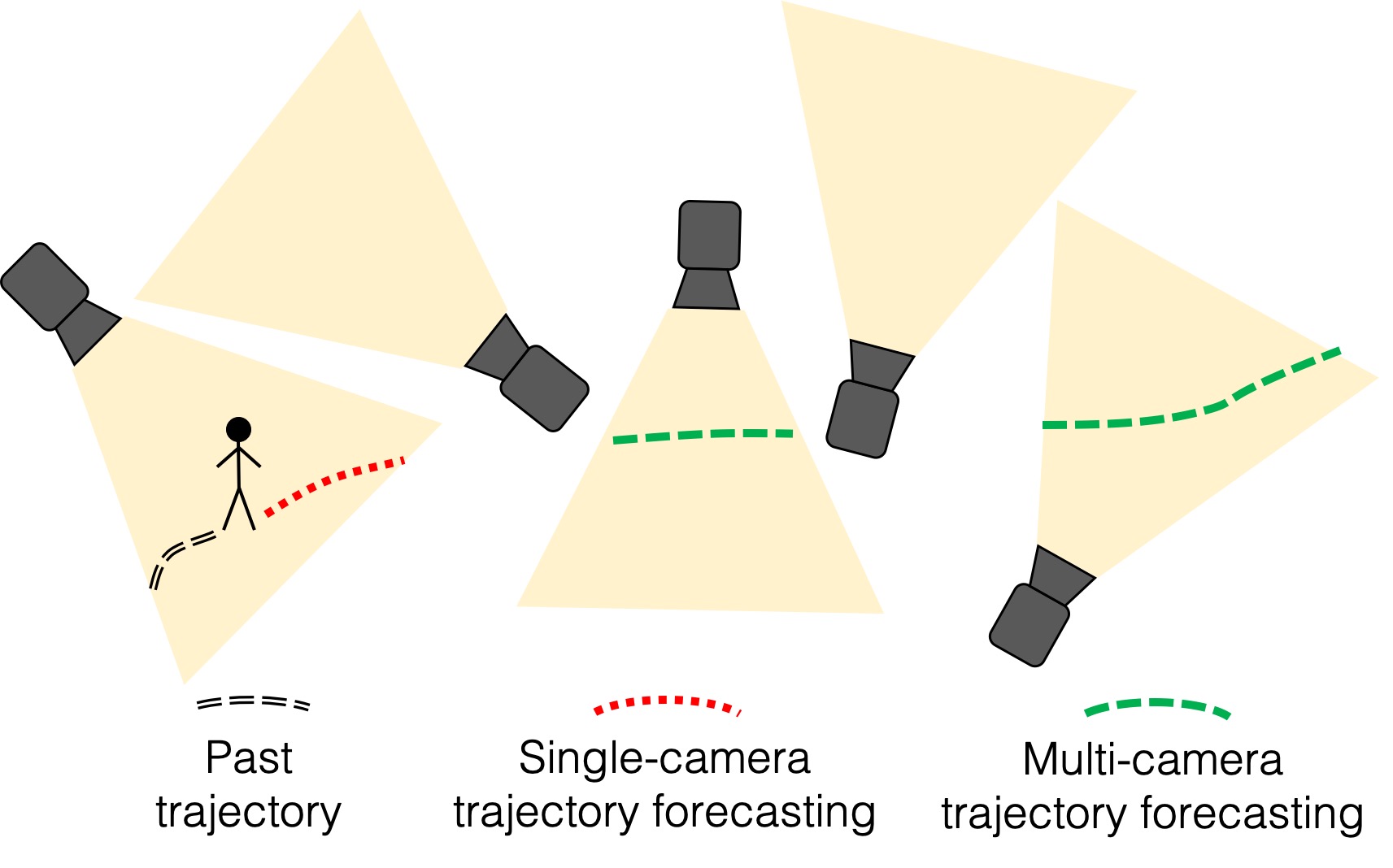
We introduce the task of multi-camera trajectory forecasting (MCTF), where the future trajectory of an object is predicted in a network of cameras. Prior works consider forecasting trajectories in a single camera view. Our work is the first to consider the challenging scenario of forecasting across multiple non-overlapping camera views. This has wide applicability in tasks such as re-identification and multi-target multi-camera tracking. To facilitate research in this new area, we release the Warwick-NTU Multi-camera Forecasting Database (WNMF), a unique dataset of multi-camera pedestrian trajectories from a network of 15 synchronized cameras. To accurately label this large dataset (600 hours of video footage), we also develop a semi-automated annotation method. An effective MCTF model should proactively anticipate where and when a person will re-appear in the camera network. In this paper, we consider the task of predicting the next camera a pedestrian will re-appear after leaving the view of another camera, and present several baseline approaches for this. The labeled database is available online: https://github.com/olly-styles/Multi-Camera-Trajectory-Forecasting.
PDF Abstract


