Learning Optical Flow and Scene Flow with Bidirectional Camera-LiDAR Fusion
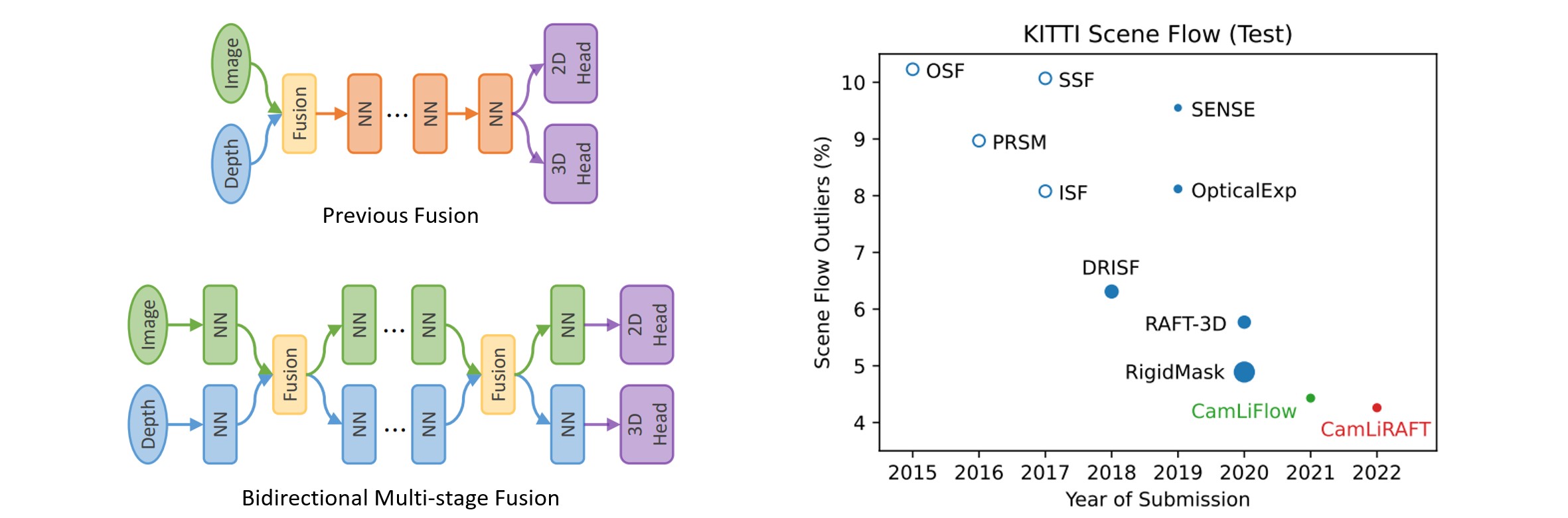
In this paper, we study the problem of jointly estimating the optical flow and scene flow from synchronized 2D and 3D data. Previous methods either employ a complex pipeline that splits the joint task into independent stages, or fuse 2D and 3D information in an ``early-fusion'' or ``late-fusion'' manner. Such one-size-fits-all approaches suffer from a dilemma of failing to fully utilize the characteristic of each modality or to maximize the inter-modality complementarity. To address the problem, we propose a novel end-to-end framework, which consists of 2D and 3D branches with multiple bidirectional fusion connections between them in specific layers. Different from previous work, we apply a point-based 3D branch to extract the LiDAR features, as it preserves the geometric structure of point clouds. To fuse dense image features and sparse point features, we propose a learnable operator named bidirectional camera-LiDAR fusion module (Bi-CLFM). We instantiate two types of the bidirectional fusion pipeline, one based on the pyramidal coarse-to-fine architecture (dubbed CamLiPWC), and the other one based on the recurrent all-pairs field transforms (dubbed CamLiRAFT). On FlyingThings3D, both CamLiPWC and CamLiRAFT surpass all existing methods and achieve up to a 47.9\% reduction in 3D end-point-error from the best published result. Our best-performing model, CamLiRAFT, achieves an error of 4.26\% on the KITTI Scene Flow benchmark, ranking 1st among all submissions with much fewer parameters. Besides, our methods have strong generalization performance and the ability to handle non-rigid motion. Code is available at https://github.com/MCG-NJU/CamLiFlow.
PDF Abstract



 KITTI
KITTI
 FlyingThings3D
FlyingThings3D
 MPI Sintel
MPI Sintel

