Large-Scale Multi-Robot Assembly Planning for Autonomous Manufacturing
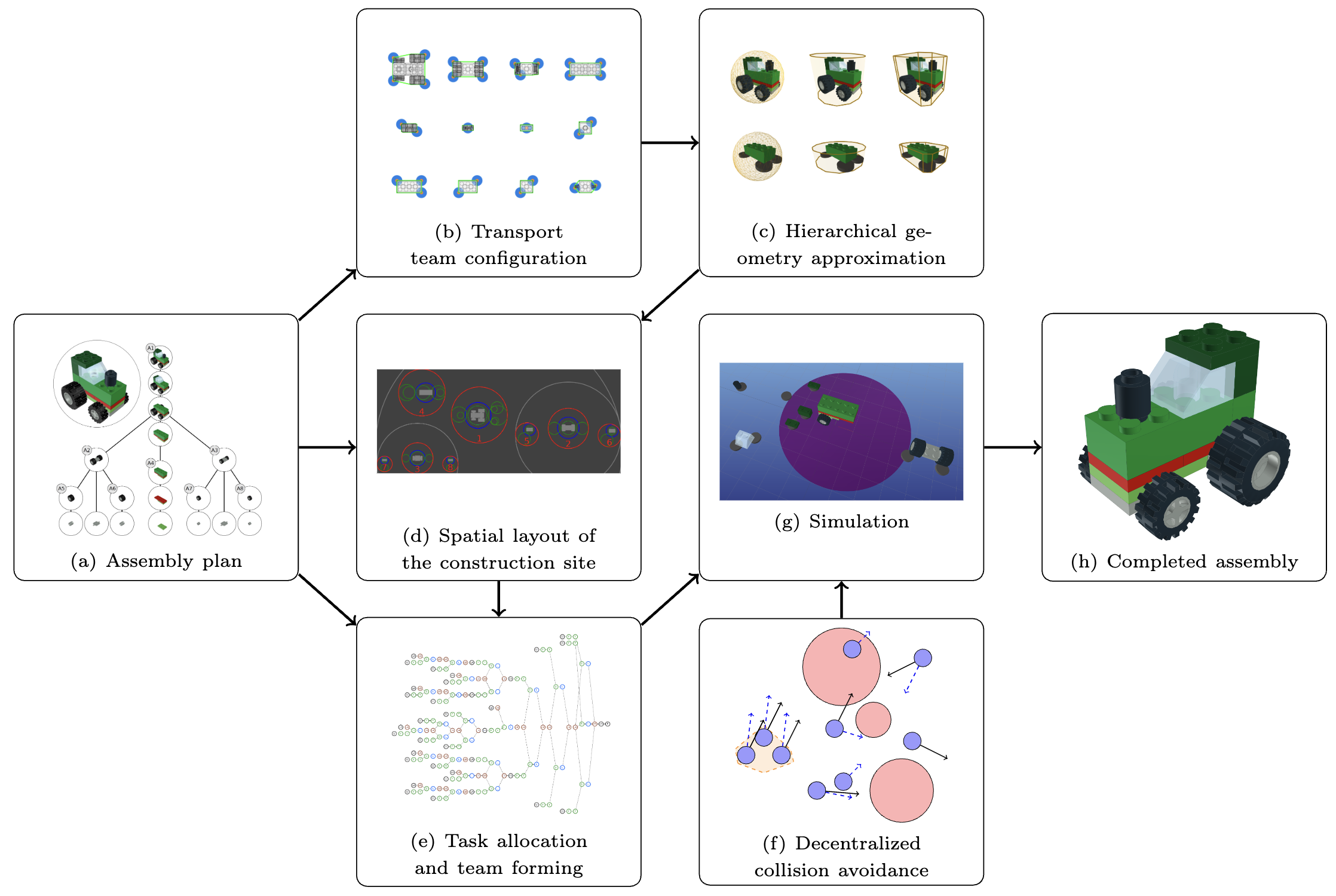
Mobile autonomous robots have the potential to revolutionize manufacturing processes. However, employing large robot fleets in manufacturing requires addressing challenges including collision-free movement in a shared workspace, effective multi-robot collaboration to manipulate and transport large payloads, complex task allocation due to coupled manufacturing processes, and spatial planning for parallel assembly and transportation of nested subassemblies. We propose a full algorithmic stack for large-scale multi-robot assembly planning that addresses these challenges and can synthesize construction plans for complex assemblies with thousands of parts in a matter of minutes. Our approach takes in a CAD-like product specification and automatically plans a full-stack assembly procedure for a group of robots to manufacture the product. We propose an algorithmic stack that comprises: (i) an iterative radial layout optimization procedure to define a global staging layout for the manufacturing facility, (ii) a graph-repair mixed-integer program formulation and a modified greedy task allocation algorithm to optimally allocate robots and robot sub-teams to assembly and transport tasks, (iii) a geometric heuristic and a hill-climbing algorithm to plan collaborative carrying configurations of robot sub-teams, and (iv) a distributed control policy that enables robots to execute the assembly motion plan collision-free. We also present an open-source multi-robot manufacturing simulator implemented in Julia as a resource to the research community, to test our algorithms and to facilitate multi-robot manufacturing research more broadly. Our empirical results demonstrate the scalability and effectiveness of our approach by generating plans to manufacture a LEGO model of a Saturn V launch vehicle with 1845 parts, 306 subassemblies, and 250 robots in under three minutes on a standard laptop computer.
PDF Abstract