Kinematic-aware Prompting for Generalizable Articulated Object Manipulation with LLMs
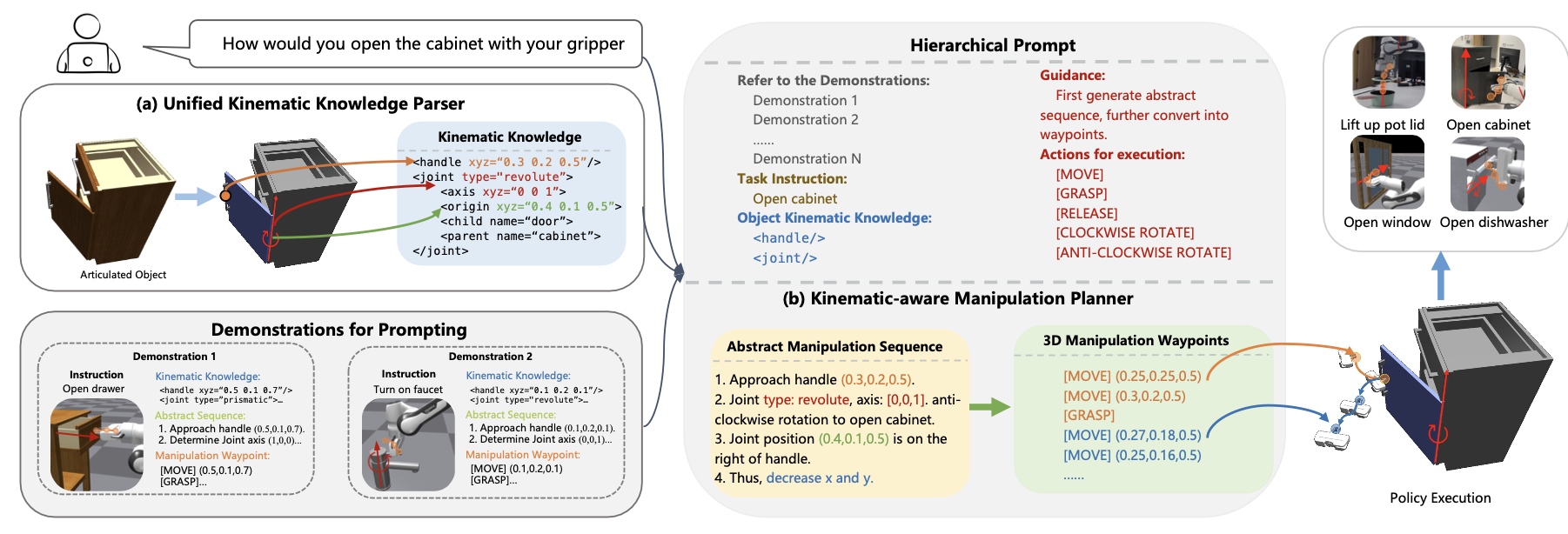
Generalizable articulated object manipulation is essential for home-assistant robots. Recent efforts focus on imitation learning from demonstrations or reinforcement learning in simulation, however, due to the prohibitive costs of real-world data collection and precise object simulation, it still remains challenging for these works to achieve broad adaptability across diverse articulated objects. Recently, many works have tried to utilize the strong in-context learning ability of Large Language Models (LLMs) to achieve generalizable robotic manipulation, but most of these researches focus on high-level task planning, sidelining low-level robotic control. In this work, building on the idea that the kinematic structure of the object determines how we can manipulate it, we propose a kinematic-aware prompting framework that prompts LLMs with kinematic knowledge of objects to generate low-level motion trajectory waypoints, supporting various object manipulation. To effectively prompt LLMs with the kinematic structure of different objects, we design a unified kinematic knowledge parser, which represents various articulated objects as a unified textual description containing kinematic joints and contact location. Building upon this unified description, a kinematic-aware planner model is proposed to generate precise 3D manipulation waypoints via a designed kinematic-aware chain-of-thoughts prompting method. Our evaluation spanned 48 instances across 16 distinct categories, revealing that our framework not only outperforms traditional methods on 8 seen categories but also shows a powerful zero-shot capability for 8 unseen articulated object categories. Moreover, the real-world experiments on 7 different object categories prove our framework's adaptability in practical scenarios. Code is released at https://github.com/GeWu-Lab/LLM_articulated_object_manipulation/tree/main.
PDF Abstract

