Is Data All That Matters? The Role of Control Frequency for Learning-Based Sampled-Data Control of Uncertain Systems
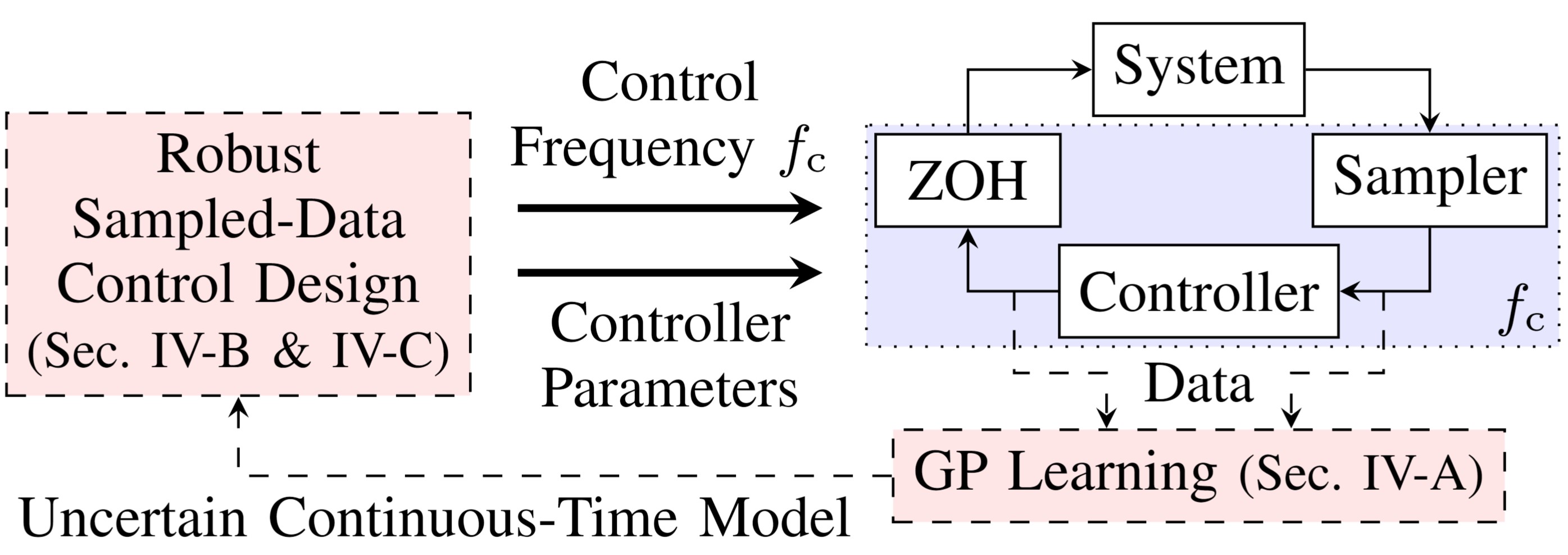
Learning models or control policies from data has become a powerful tool to improve the performance of uncertain systems. While a strong focus has been placed on increasing the amount and quality of data to improve performance, data can never fully eliminate uncertainty, making feedback necessary to ensure stability and performance. We show that the control frequency at which the input is recalculated is a crucial design parameter, yet it has hardly been considered before. We address this gap by combining probabilistic model learning and sampled-data control. We use Gaussian processes (GPs) to learn a continuous-time model and compute a corresponding discrete-time controller. The result is an uncertain sampled-data control system, for which we derive robust stability conditions. We formulate semidefinite programs to compute the minimum control frequency required for stability and to optimize performance. As a result, our approach enables us to study the effect of both control frequency and data on stability and closed-loop performance. We show in numerical simulations of a quadrotor that performance can be improved by increasing either the amount of data or the control frequency, and that we can trade off one for the other. For example, by increasing the control frequency by 33%, we can reduce the number of data points by half while still achieving similar performance.
PDF Abstract
