Intervention Design for Effective Sim2Real Transfer
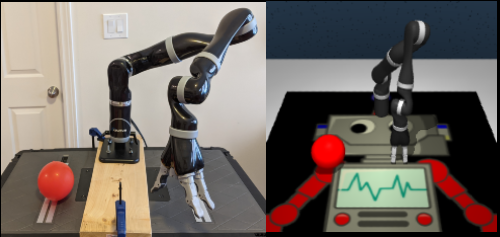
The goal of this work is to address the recent success of domain randomization and data augmentation for the sim2real setting. We explain this success through the lens of causal inference, positioning domain randomization and data augmentation as interventions on the environment which encourage invariance to irrelevant features. Such interventions include visual perturbations that have no effect on reward and dynamics. This encourages the learning algorithm to be robust to these types of variations and learn to attend to the true causal mechanisms for solving the task. This connection leads to two key findings: (1) perturbations to the environment do not have to be realistic, but merely show variation along dimensions that also vary in the real world, and (2) use of an explicit invariance-inducing objective improves generalization in sim2sim and sim2real transfer settings over just data augmentation or domain randomization alone. We demonstrate the capability of our method by performing zero-shot transfer of a robot arm reach task on a 7DoF Jaco arm learning from pixel observations.
PDF Abstract


