InSphereNet: a Concise Representation and Classification Method for 3D Object
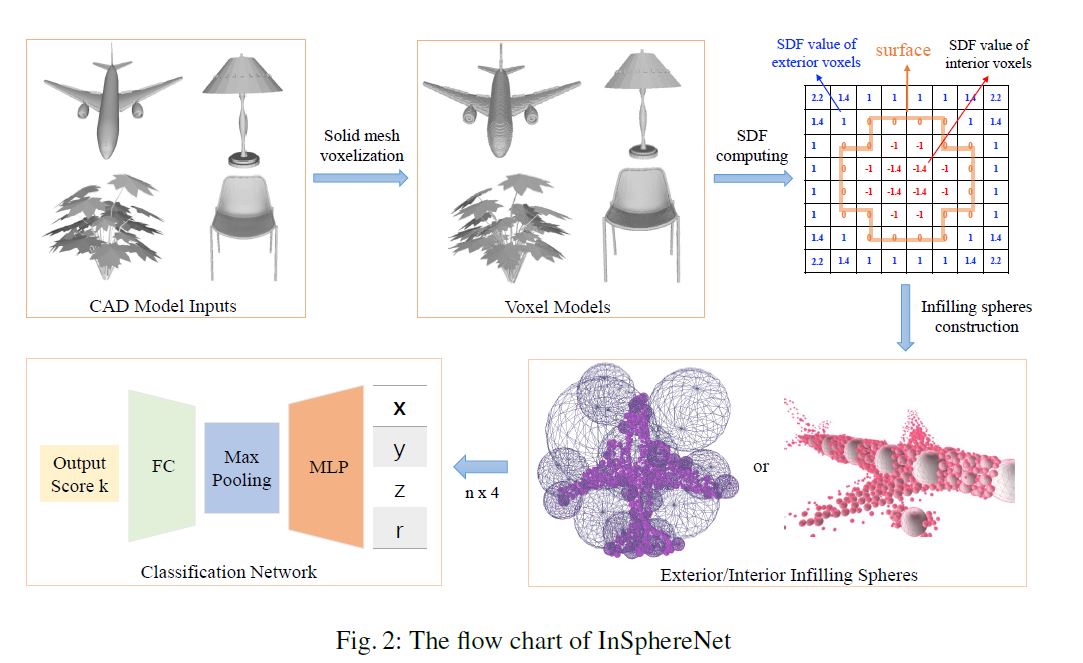
In this paper, we present an InSphereNet method for the problem of 3D object classification. Unlike previous methods that use points, voxels, or multi-view images as inputs of deep neural network (DNN), the proposed method constructs a class of more representative features named infilling spheres from signed distance field (SDF). Because of the admirable spatial representation of infilling spheres, we can not only utilize very fewer number of spheres to accomplish classification task, but also design a lightweight InSphereNet with less layers and parameters than previous methods. Experiments on ModelNet40 show that the proposed method leads to superior performance than PointNet and PointNet++ in accuracy. In particular, if there are only a few dozen sphere inputs or about 100000 DNN parameters, the accuracy of our method remains at a very high level (over 88%). This further validates the conciseness and effectiveness of the proposed InSphere 3D representation. Keywords: 3D object classification , signed distance field , deep learning , infilling sphere
PDF Abstract



 ModelNet
ModelNet
