Hierarchical Point-based Active Learning for Semi-supervised Point Cloud Semantic Segmentation
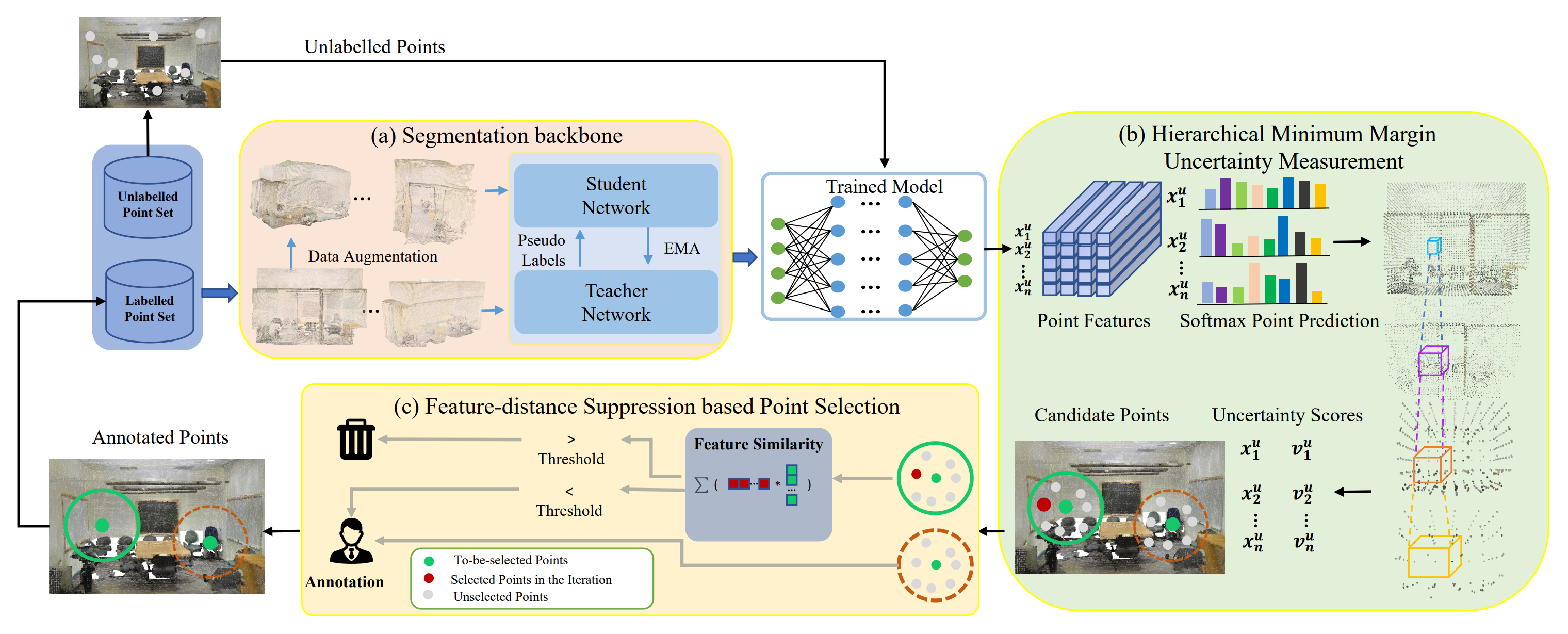
Impressive performance on point cloud semantic segmentation has been achieved by fully-supervised methods with large amounts of labelled data. As it is labour-intensive to acquire large-scale point cloud data with point-wise labels, many attempts have been made to explore learning 3D point cloud segmentation with limited annotations. Active learning is one of the effective strategies to achieve this purpose but is still under-explored. The most recent methods of this kind measure the uncertainty of each pre-divided region for manual labelling but they suffer from redundant information and require additional efforts for region division. This paper aims at addressing this issue by developing a hierarchical point-based active learning strategy. Specifically, we measure the uncertainty for each point by a hierarchical minimum margin uncertainty module which considers the contextual information at multiple levels. Then, a feature-distance suppression strategy is designed to select important and representative points for manual labelling. Besides, to better exploit the unlabelled data, we build a semi-supervised segmentation framework based on our active strategy. Extensive experiments on the S3DIS and ScanNetV2 datasets demonstrate that the proposed framework achieves 96.5% and 100% performance of fully-supervised baseline with only 0.07% and 0.1% training data, respectively, outperforming the state-of-the-art weakly-supervised and active learning methods. The code will be available at https://github.com/SmiletoE/HPAL.
PDF Abstract ICCV 2023 PDF ICCV 2023 Abstract


 ScanNet
ScanNet
 S3DIS
S3DIS
