Few-shot Object Localization
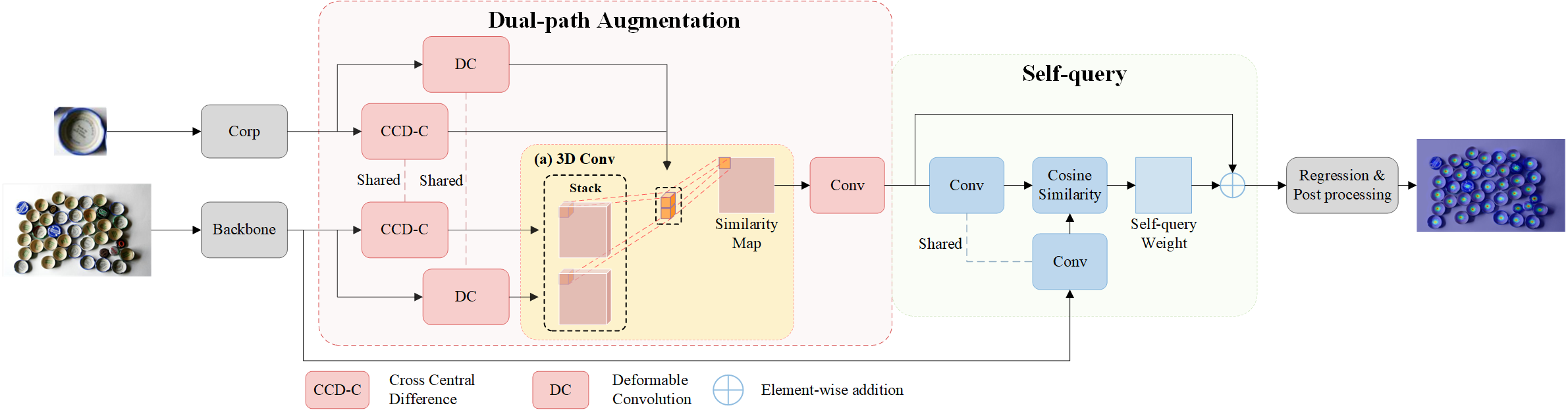
Existing object localization methods are tailored to locate a specific class of objects, relying on abundant labeled data for model optimization. However, in numerous real-world scenarios, acquiring large labeled data can be arduous, significantly constraining the broader application of localization models. To bridge this research gap, this paper proposes the novel task of Few-Shot Object Localization (FSOL), which seeks to achieve precise localization with limited samples available. This task achieves generalized object localization by leveraging a small number of labeled support samples to query the positional information of objects within corresponding images. To advance this research field, we propose an innovative high-performance baseline model. Our model integrates a dual-path feature augmentation module to enhance shape association and gradient differences between supports and query images, alongside a self query module designed to explore the association between feature maps and query images. Experimental results demonstrate a significant performance improvement of our approach in the FSOL task, establishing an efficient benchmark for further research. All codes and data are available at https://github.com/Ryh1218/FSOL.
PDF Abstract

 ShanghaiTech
ShanghaiTech
 CARPK
CARPK
 FSC147
FSC147
