Few-shot Class-incremental Learning for 3D Point Cloud Objects
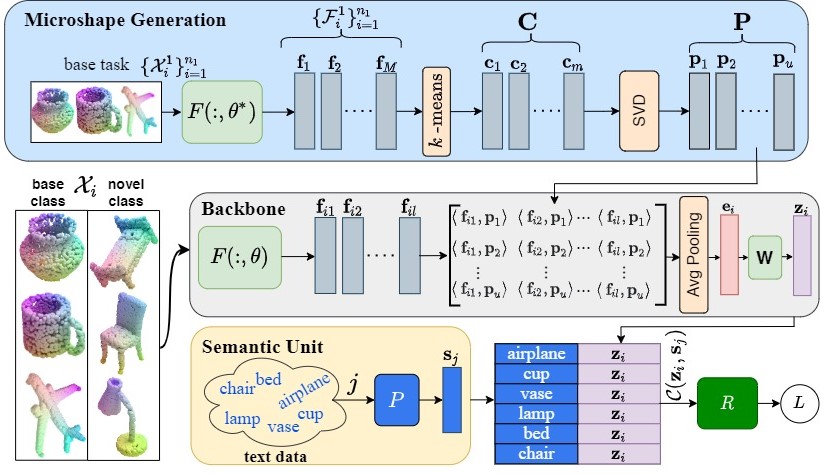
Few-shot class-incremental learning (FSCIL) aims to incrementally fine-tune a model (trained on base classes) for a novel set of classes using a few examples without forgetting the previous training. Recent efforts address this problem primarily on 2D images. However, due to the advancement of camera technology, 3D point cloud data has become more available than ever, which warrants considering FSCIL on 3D data. This paper addresses FSCIL in the 3D domain. In addition to well-known issues of catastrophic forgetting of past knowledge and overfitting of few-shot data, 3D FSCIL can bring newer challenges. For example, base classes may contain many synthetic instances in a realistic scenario. In contrast, only a few real-scanned samples (from RGBD sensors) of novel classes are available in incremental steps. Due to the data variation from synthetic to real, FSCIL endures additional challenges, degrading performance in later incremental steps. We attempt to solve this problem using Microshapes (orthogonal basis vectors) by describing any 3D objects using a pre-defined set of rules. It supports incremental training with few-shot examples minimizing synthetic to real data variation. We propose new test protocols for 3D FSCIL using popular synthetic datasets (ModelNet and ShapeNet) and 3D real-scanned datasets (ScanObjectNN and CO3D). By comparing state-of-the-art methods, we establish the effectiveness of our approach in the 3D domain.
PDF Abstract


 ShapeNet
ShapeNet
 ModelNet
ModelNet
