DiverseDepth: Affine-invariant Depth Prediction Using Diverse Data
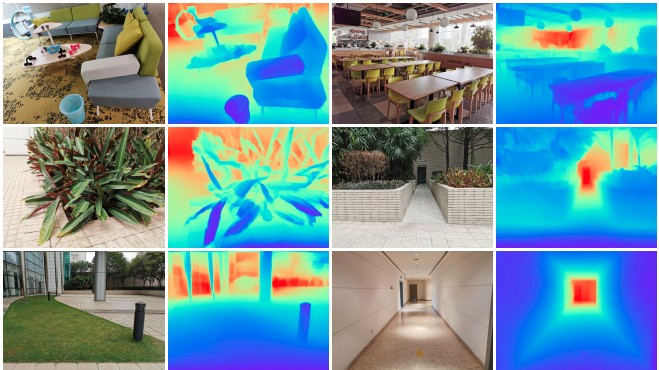
We present a method for depth estimation with monocular images, which can predict high-quality depth on diverse scenes up to an affine transformation, thus preserving accurate shapes of a scene. Previous methods that predict metric depth often work well only for a specific scene. In contrast, learning relative depth (information of being closer or further) can enjoy better generalization, with the price of failing to recover the accurate geometric shape of the scene. In this work, we propose a dataset and methods to tackle this dilemma, aiming to predict accurate depth up to an affine transformation with good generalization to diverse scenes. First we construct a large-scale and diverse dataset, termed Diverse Scene Depth dataset (DiverseDepth), which has a broad range of scenes and foreground contents. Compared with previous learning objectives, i.e., learning metric depth or relative depth, we propose to learn the affine-invariant depth using our diverse dataset to ensure both generalization and high-quality geometric shapes of scenes. Furthermore, in order to train the model on the complex dataset effectively, we propose a multi-curriculum learning method. Experiments show that our method outperforms previous methods on 8 datasets by a large margin with the zero-shot test setting, demonstrating the excellent generalization capacity of the learned model to diverse scenes. The reconstructed point clouds with the predicted depth show that our method can recover high-quality 3D shapes. Code and dataset are available at: https://tinyurl.com/DiverseDepth
PDF Abstract


 Taskonomy
Taskonomy
 MegaDepth
MegaDepth
 ETH3D
ETH3D
 ReDWeb
ReDWeb
