CoDEPS: Online Continual Learning for Depth Estimation and Panoptic Segmentation
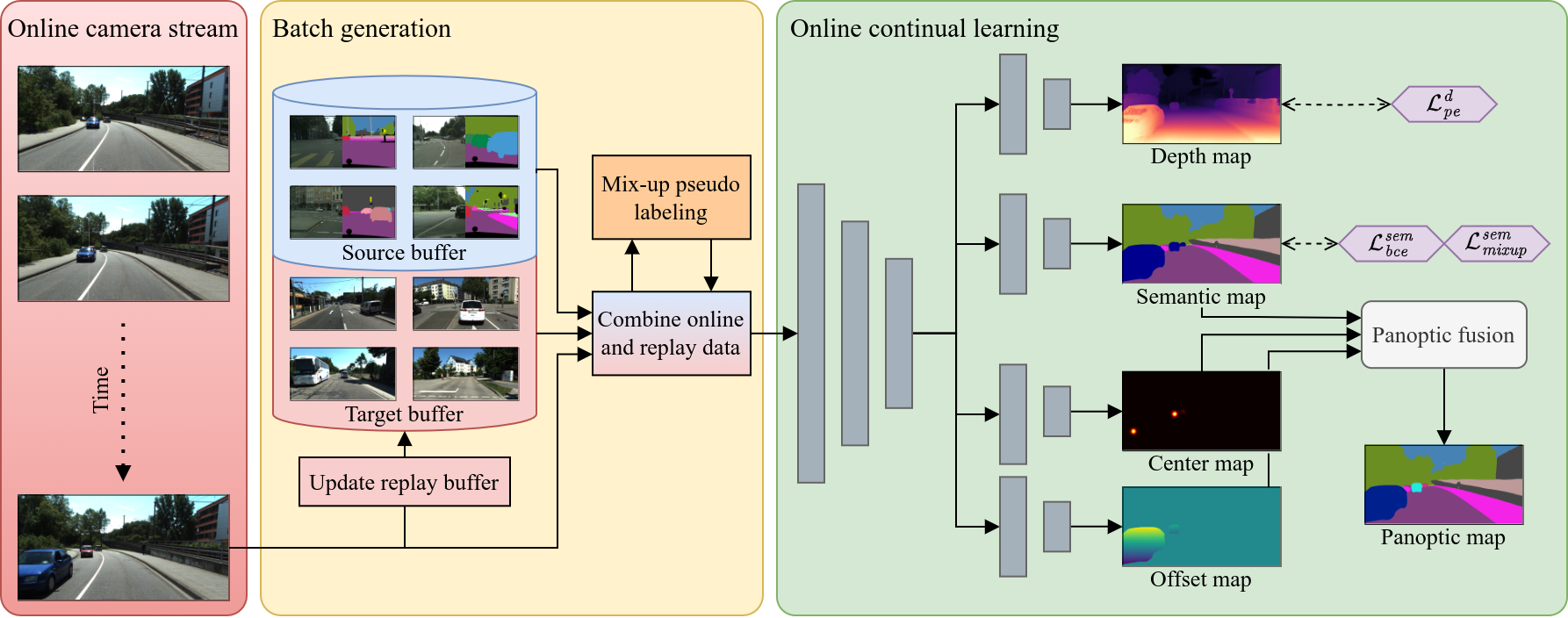
Operating a robot in the open world requires a high level of robustness with respect to previously unseen environments. Optimally, the robot is able to adapt by itself to new conditions without human supervision, e.g., automatically adjusting its perception system to changing lighting conditions. In this work, we address the task of continual learning for deep learning-based monocular depth estimation and panoptic segmentation in new environments in an online manner. We introduce CoDEPS to perform continual learning involving multiple real-world domains while mitigating catastrophic forgetting by leveraging experience replay. In particular, we propose a novel domain-mixing strategy to generate pseudo-labels to adapt panoptic segmentation. Furthermore, we explicitly address the limited storage capacity of robotic systems by leveraging sampling strategies for constructing a fixed-size replay buffer based on rare semantic class sampling and image diversity. We perform extensive evaluations of CoDEPS on various real-world datasets demonstrating that it successfully adapts to unseen environments without sacrificing performance on previous domains while achieving state-of-the-art results. The code of our work is publicly available at http://codeps.cs.uni-freiburg.de.
PDF Abstract




 Cityscapes
Cityscapes
 KITTI
KITTI
 KITTI-360
KITTI-360
